 Вход
ВходБытовые роботы - обзор роботов различного назначения. Роботизированная техника
Фантасты 50-х представляли себе 2000 год с летающими машинами и роботами, живущими бок о бок с человеком.
Как мы видим, этого пока не случилось, тем не менее сфера робототехники постепенно развивались в течение десятилетий, иногда стремительно затем ее развитие приутихло, но в настоящее время вновь возобносила небывалый рост. Каждый месяц производятся тысячи различных промышленных роботов, разрабатываются гуманоиды и андроиды, ученые всего мира работают созданием искусственного интеллекта, и все это -только начало.
Робототехника - это не самостоятельная отрасль, прежде всего это синергия всех последних достижений технических, естественных наук и информационных технологий.
Когда мы говорим "робот", то люди далеки от техники его примерно так и представляют как в советских фантастических фильмах с железными руками и ногами. Конечно, мы вкладываем в это понятие гораздо более широкий смысл.
Выделяют следующие группы роботов:
1. Промышленные - когда говорят "роботизация" имеют ввиду прежде всего развитие этой сферы.
2. Военные - единственный вид, который получил развитие в России, к ним же можно отнести роботов ливидаторов различных аварий и природных катаклизмов.
3. Космические - к ним относятся и спутники, планетоходы и антропоморфные роботы, помогающие космонавтам.
4. Бытовые - уборщики, кухонные роботы, роботы - компаньоны.
5. Андроиды, гуманоиды - различные антропоморфные роботы, чьей целью является усовершенствование "человекообразности" роботов для различных социальных целей.
История робототехники
Автоматизация и роботизация производства в капиталистическом мире началась в 50-е годы XX века. Именно к тому времени можно отнести появление первых промышленных роботов. Они осуществляли сборку оборудования, и простейшие монотонные операции.
Первый такой робот был разработан изобретателем самоучкой Джоржем Деволом в 1954 году. Робот-манипулятор весил две тонны и управлялся программой записанной на магнитном барабане. Система получила название Unimate на новое устройство был оформлен патент и а в 1961 изобретатель основал компанию Unimation.
Первый робот был установлен на заводе Дженерал Моторс (на литейном участке) в 1961 году. Затем новинка была опробована заводами Chrysler и Ford,
 Система Unimate применялась для работы с литыми металлическими деталями, которые манипулятор извлекал из форм отливки. Захватиное устройство управлялось гидроприводом.
Система Unimate применялась для работы с литыми металлическими деталями, которые манипулятор извлекал из форм отливки. Захватиное устройство управлялось гидроприводом.
Робот имел 5 степеней свободы и захватное устройство с двумя "пальцами". Точность работы была весьма высока до 1,25 мм. И был эффективнее человека - работал и быстрее и с меньшим количеством брака.
В 1967 промышленные манипуляторы приходят Европу. Они уже расширяют свой функционал, осваивают профессии сварщика, маляра. У робота появляется "техническое зрение" посредством видеокамер и датчиков, он учится определять габариты изделий и место их расположения.
В 1982 году IBM разрабатывает официальный язык для программирования робототехнических систем. В 1984 - компания Adept представила первый робот Scara с электроприводом .
Новая конструкция сделала роботы более простыми и надежными, сохранив высокую скорость.
В 90-е появился контроллер с интуитивным интерфейсом управления, которому мог управлять оператор, он мог изменять параметры и регулировать режим работы. С тех пор возможности управления роботами и их функиции только развивались, увеличивалась их сложность, скорость, число осей, стали использоваться различные материалы, шире становились возможности разработки и управления, было сделано несколько первых уверенных шагов в сторону искусственного интеллекта.
 В то же время в СССР был фактически лидером в робототехнике. Началось все еще в 30-е годы. В 1936 году 16–летний советский школьник Вадим Мацкевич создал робота, который умел поднимать правую руку. Для этого он потратил 2 года работы в токарных мастерских новочеркасского Политеха. Ранее, в 12 лет создал маленький радиоуправляемый броневик, стрелявший фейерверками. На "робота" Мацкевича обратили внимание власти и в 1937 году он представлял его на Всемирной выставке 1937 года в Париже.
В то же время в СССР был фактически лидером в робототехнике. Началось все еще в 30-е годы. В 1936 году 16–летний советский школьник Вадим Мацкевич создал робота, который умел поднимать правую руку. Для этого он потратил 2 года работы в токарных мастерских новочеркасского Политеха. Ранее, в 12 лет создал маленький радиоуправляемый броневик, стрелявший фейерверками. На "робота" Мацкевича обратили внимание власти и в 1937 году он представлял его на Всемирной выставке 1937 года в Париже.
На рубеже 30 - 40-х гг. XX в. в СССР также появились автоматические линии для обработки деталей подшипников, а в конце 40-х гг. XX в. впервые в мировой практике было создано комплексное производство поршней для тракторных двигателей с автоматизацией всех процессов - от загрузки сырья до упаковки готовой продукции.
В 1966 в Воронеже был изобретен манипулятор для укладки металлических листов, в 1968 в Ленинграде году разработали подводный робот "Манта" с чувствительным захватным устройством - в дальнейшем он совершенствовался. В 1969 году в ЦНИТИ Миноборонпрома приступили к разработке промышленного робота «Универсал-50». В дальнейшем активно внедрялись автоматизированные системы на крупные производства.
В 1985 году уже использовалось 40 тыс промышленых роботов и в несколько раз превосходило количество, используемых в США. Автоматизированые линии вовсю работали на АвтоВазе в 80-е года и даже подвергались атакам работников-"хакеров".

Были крупные военные и космические разработки. Уникальным достижением по тем временам был беспилотный разведчик ДБР-1, который был принят на вооружение ВВС СССР еще в 1964 году. Такой аппарат мог выполнять разведывательные задачи над всей территорией Западной и Центральной Европы.
Одним из самых заметных достижений отечественной робототехники и науки стало создание в КБ им. Лавочкина «Лунохода-1». Именно советский аппарат стал первым в мире планетоходом, который успешно выполнил свою миссию на поверхности другого небесного тела.
В 1983 году на вооружение ВМФ СССР был принят уникальный противокорабельный комплекс П-700 «Гранит». Его особенностью стало то, что при залповом пуске ракеты могли самостоятельно выстраиваться в боевой порядок и во время полета обмениваться между собой информацией, самостоятельно распределяя цели. При этом одна из ракет комплекса могла играть роль лидера, занимая более высокий эшелон атаки.
Развивались и "роботы-гуманоиды": в 1962 году появился первый робот экскурсовод Рэкс - он проводил экскурсии для детей в Политехническом музее. Говорят, он все еще там "работает".
В Советском Союзе было выпущено более 100 тыс. единиц промышленной робототехники. Они заменили более одного миллиона рабочих, но в 90-е годы эти роботы исчезли.
В дальнейшем развитие робототехники идет ударными темпами, потому что развивается ключевые отрасли - физика, химия, электротехника и главное - электроника. На смену вакуумным лампам пришла силовая электроника, позже микросхемы, затем микроконтроллеры... Появляются новые материалы, новые способы автоматизации и методы программирования.
Но к России и СНГ это не уже не относится. Прежде всего развитие происходит в США, в Юго-Восточной Азии и Западной Европе.
На производствах внедряются управляемые роботизированные линии, роботы манипуляторы используются во всех отраслях промышленности, в сельском хозяйстве, медицине, в космосе и, конечно, в быту.
В некоторых отраслях до 50% работ выполняют промышленные роботы, например в автомобилестроении они могут сварить, покрасить, и переместить детали на другой участок сборки, где ими займутся другие роботы.
Существуют даже 100% автоматизированные фабрики. В Японии есть завод где роботы сами собирают роботов. И даже готовят еду для 2000 человек - офисного центра, обслуживающего этот завод.

В 90-е годы наблюдался некоторый спад. Внедрение роботов, использующих существующие в то время технологии, на производство не принесло ожидаемой прибыли и финансирование некоторых крупномасштабных проектов было приостановлено. По ряду причин - и экономических, и социальных - ожидаемого бума не произошло, они остались как нишевая продукция для автосборочных и ряда других производств.
Резкий скачок произошел только в середине нулевых и это развитие продолжается. Прежде всего из-за того, что в робототехнике заинтересовались военные...
Остановить уже развитие невозможно и все странам, желающим быть в авангарде мировой промышленности приходится это принимать и догонять.
Устройство робота и задачи робототехники
Выделяют шесть общих задач роботехники:
- Перемещение - передвижение в любой среде
- Ориентация - осознавать свое местоположение
- Манипуляция - свободно манипулировать предметами окружающей среды
- Взаимодействие - контактировать с себеподобными
- Коммуникация - свободно общаться с человеком
- Искусственный интеллект - робот должен самостоятельно решать как ему выполнить команду человека
Самое оптимальное перемещение робота на колесах и гусеничной платформе. Именно эти способы обеспечивают наибольшую устойчивость и проходимость.
У колесных платформ с проходимостью сложнее - колесо не может преодолеть препятствие выше, чем его радиус. Колесные схемы постоянно совершенствуются, используются мощные серводвигатели , разрабатывается независимые подвески, применяются покрышки с грунтозацепами.
Устойчивы четырехноние и инсектоморфные роботы (это значит в форме насекомых, несколько "ног", обычно 6) Такие устройства часто используются для военных целей.
Ходить на двух ногах робот учился очень долго. Из всех существующих с этим хорошо справляется только гуманоид ASIMO от Honda он умеет не только устойчиво ходить, но и подниматься по ступеням, компания его разрабатывала более 25 лет
Большинство же человекоподобных роботов пока передвигаются на платформе.
Кроме хождения по земле опреденные модели могут ползать, плавать и летать.
Ориентрируется в пространстве робот с помощью датчиков, сенсоров, видеокамер, имеет способность "видеть" в инфракрасном диапазоне, улаваливать ультразвуковые колебания и воспринимать тепловое излучение.
Управлять может и оператор, он может находиться в той же комнате или за несколько километров.
Все озвученные задачи робототехники в той или иной мере решаются. Робот становится совершеннее, он умеет сотрудничать с другими роботами, учится общаться человеком и лучше его понимать.
Интересная схема обучения космического робота-спутника, вероятно этот же принцип используется для настройки других робототехнических систем. "Эмоциональное обучение", как называют его разработчики. Суть его в том, что в нем закладывается "аппарат эмоций", который сообщает спутнику что для него "хорошо", а что "плохо". Хорошо - если он нацеливается на конкретный заданный обьект - это увеличивает оценку, плохо - если от него отклоняется - оценка будет уменьшена. Ну и так пока устройство не станет стабильным "хорошистом".
Например, это может пригодиться для космических телескопов. Обучение проводится с помощью оператора и занимает около 20 минут, результат отображается в базе знаний.
Конкретно это описанное устройство космонавт может выбросить в открытый космос: остальные действия спутник выполнит сам. В концепте разработана модель нервной системы, которая логически следует из тех условий, в которых работает нервная система всех живых организмов.
Робототехника будущего может самостоятельно собирать новые знания, анализировать их и применять на практике.
Робототехника завоевывает сегодня все большие отрасли промышленности и все плотнее внедряется в различные сферы человеческой жизни. И если раньше роботы могли выполнять роль человека, замещая его на заводах, где часто требуются однообразные действия при конвейерном производстве, например при производстве автомобилей, то теперь наступили времена, когда роботы способны оказаться и в каждом доме, чтобы помогать человеку решать насущные задачи, и способствовать экономии наших времени и сил.
Бытовые роботы, предназначенные для помощи человеку в его повседневной жизни, набирают все большую популярность, что вовсе не удивительно, ведь разнообразие роботов растет с каждым годом. Уже сегодня это и пылесосы, и газонокосилки, и мойщики окон, и чистильщики бассейнов, и даже снегоуборочные роботы.
Кстати, еще в 2007 году Билл Гейтс обратил внимание на значительный потенциал данного технологического направления, опубликовав статью «Робот в каждом доме», где он отразил перспективы, которые откроются обществу, благодаря внедрению бытовых роботов.
Предметом данной статьи будет краткий обзор набирающих популярность типов бытовых роботов. Мы рассмотрим несколько роботов, предназначенных для различных бытовых применений, посмотрим как они работают, что могут, как их нужно использовать, и насколько легко с ними обращаться.

Поскольку робот-пылесос является устройством автономным, то он обязательно оснащен не только аккумулятором, но и камерой, помогающей ему ориентироваться в помещении, чтобы два раза не убирать одно и то же место.
Робот просто предварительно выстраивает оптимальную карту уборки, опираясь на данные с камеры, затем приступает непосредственно к уборке, по окончании которой возвращается на место старта, связанное с зарядным устройством.
На борту пылесоса имеются все необходимые датчики (включая гироскоп), позволяющие прибору измерять расстояние до препятствия, оценивать высоту основания мебели над полом (сможет ли он под нее заехать), фиксировать столкновение, определять наличие на месте пылесборника и т.д. Интеллектуальная электроника позволяет роботу нормально ориентироваться среди мебели и стен в процессе работы.
Пылесборник компактен, и располагается недалеко от щеток. Для движения робот использует два колеса, при помощи которых он может поворачивать. Две направляющие щетки заметают мусор в направлении турбощетки, которая в свою очередь направляет мусор в пылесборник, где всасывающее устройство окончательно захватывает мусор. Питается все это оборудование от емкостью в несколько ампер-часов.
Благодаря наличию гироскопа, робот-пылесос всегда «знает» угол своего наклона, и поэтому вероятность того, что он застрянет исключается. Единственный недостаток таких роботов-пылесосов — малая сила всасывания. Они подойдут для уборки гладких напольных покрытий, таких как линолеум или ламинат, но с уборкой сильно загрязненного коврового покрытия справятся вряд ли.
В любом случае, робот-пылесос способен сильно облегчить нашу жизнь. Человеку уже не придется каждый раз, когда он увидит на полу пыль, бежать за веником, чтобы подмести. Достаточно запрограммировать робота на регулярную уборку, и он будет самостоятельно осуществлять профилактику по всей квартире, по дому или даже офису.

Есть два типа роботов для мойки окон. Первый тип — робот из двух частей, в одной из которых находится управляющая электроника, а в другой — чистящий механизм. Две части крепятся к оконному стеклу с разных сторон, и держатся на нем за счет постоянных магнитов.
Сначала робот задает себе карту для работы, предварительно доезжая до каждого из краев стекла, измеряя таким образом размер поверхности которая должна быть вымыта, затем начинает мыть ее, двигаясь зигзагом.
В качестве инструментов для мытья служат четыре подушечки из микрофибры, а перемещение достигается благодаря взаимодействию постоянных магнитов и управляющего модуля.
В центре между подушечками расположено отверстие, из которого подается моющее средство. Питается устройство от встроенного литиевого аккумулятора. Человеку достаточно запустить аппарат, и он сам все сделает, используя предварительно заправленное в специальный резервуар моющее средство.

Второй тип робота-мойщика окон — робот с креплением вакуумными присосками. Такой робот имеет только один и только рабочий модуль для одной стороны окна.
Робот по сути протирает стекло, перемещаясь влево и вправо по его поверхности, без использования вращающихся подушечек. Здесь используется сменная салфетка, которую необходимо предварительно смочить моющим средством вручную.
Робот питается от сети, хотя и выполняет работу автономно, стоит его включить и установить на стекло. Есть резервный аккумулятор на случай отключения электричества в доме. Пользователю остается установить робота на стекло и включить его.

Принцип работы данных роботов заключается в следующем. Первым делом прокладывают кабель-ограничитель, по которому течет постоянный ток, и который определяет собой границу рабочей зоны робота-газонокосилки. Такая автономная газонокосилка оснащена всеми необходимыми датчиками, включая датчики препятствий, как и у роботов-пылесосов, чтобы газонокосилка могла бы объехать дерево, бордюр или клумбу.
Кабель-ограничитель необходим для того, чтобы газонокосилка не упала в водоем или не стала бы пытаться косить камни садовой дорожки, тем самым нанося себе вред. Кабелем ограждают периметр, клумбы, каменные дорожки, водоемы.
В процессе работы газонокосилка хаотично движется по площади в пределах периметра, срезая ножами траву. Некоторые модели двигаются не хаотично, а по спирали или зигзагом, это зависит от производителя.
Параметры роботов-газонокосилок отличаются. В первую очередь — шириной захвата. Согласитесь, при ширине захвата в 56 см, по сравнению с 24 см, дело пойдет и будет завершено быстрее. Мощность также имеет значение.
Газонокосилка мощностью 500 ватт и с шириной захвата в 56 см гораздо быстрее пройдет ту же площадь, что 100 ваттная модель. Аккумулятор здесь, безусловно определяет площадь, которую сможет обслужить робот на одной подзарядке. Есть роботы-газонокосилки, рассчитанные на 4 сотки, а есть — на все 30 соток.
Имеется ли в комплекте база для подзарядки, чтобы газонокосилка могла самостоятельно подъехать, подзарядиться и продолжить работу? На это потребителю необходимо обратить внимание при выборе модели, иначе придется самостоятельно носить робота на подзарядку, что не всегда удобно.
Если есть зарядная базовая станция, то человек сможет запрограммировать газонокосилку на весь сезон и не беспокоиться о графике выполнения работ по стрижке газона.

Робот имеет шнур питания и пару колес для перемещения по дну и по стенкам бассейна. В зависимости от длины провода нормируется размер бассейна, с которым сможет справиться робот. Щетки робота вращаются независимо от колес, и легко удаляют слизь и грязь, направляя ее через фильтр.
Вода вместе с грязью всасывается в фильтрующий отсек робота, затем вода выбрасывается обратно в бассейн, а грязь оседает на фильтре. Фильтр потом нужно будет просто вытащить и промыть под водой.
Робот для чистки бассейна сначала очищает дно, затем движется по стенкам, присасываясь к ним. Так, 70% времени уходит на чистку дна, а 30% - на чистку стен бассейна. Типичный бассейн площадью дна 28 кв.м. средний робот очистит за 2-3 часа.
Несмотря на то, что вода проходит через фильтр робота, всасываясь его насосом, хозяину бассейна необходимо будет как всегда использовать систему очистки воды бассейна, робот не заменит ее собой, он только очистит поверхности, но не саму воду. Тем не менее, робот избавит своего хозяина не только от необходимости чистить бассейн вручную, но и от надобности наблюдать за процессом чистки.

Наконец, робот-снегоуборщик, - актуальнейшее для наших широт решение. Вместо того, чтобы размахивать лопатой там, где не может проехать габаритная снегоуборочная техника, поможет снегоуборочный робот. Управление роботом осуществляется со смартфона по wi-fi, и выглядит это как интерактивная игра.
Поднимать и опускать ковш, перемещаться на гусеницах назад и вперед, разворачиваться, - все это может делать робот, которым оператор управляет удаленно, даже находясь дома в тепле за компьютером.
Глазами робота является видеокамера, через которую пользователь может оценивать обстановку, чтобы затем направлять робота для выполнения снегоуборочных работ.
Емкий аккумулятор, заряженный от розетки, позволит осуществлять уборку снега в течение нескольких часов без необходимости таскать снег вручную, особенно если речь идет об уборке больших территорий, вблизи строений, куда снегоуборочная техника проехать просто не может.
Как видите, ассортимент бытовых роботов сегодня довольно широк, и каждый человек наверняка найдет среди доступных сегодня на рынке именно то, что облегчит быт именно ему. Кому-то нужно регулярно чистить летний приусадебный бассейн, а кто-то замучился зимой чистить снег.
Каждый имеющий в доме животных задумается о приобретении робота-пылесоса, некоторые из которых с животными отлично ладят. Живете в районе с сильно загрязненным воздухом и окна часто становятся пыльными — робот поможет вам вымыть окна. Что уж говорить о роботе-газонокосилке, который позволит своему хозяину заниматься другими более важными делами или просто отдыхать, пока газоном занимается робот.
Андрей Повный
Робот - это программируемое механической устройство, способное выполнять задачи и взаимодействовать с внешней средой без помощи со стороны человека. Робототехника - это научная и техническая база для проектирования, производства и применения роботов.
Слово «робот» было впервые использовано чешским драматургом Карлом Чапеком в 1921. В его произведении «Универсальные роботы Россума» речь шла о классе рабов, искусственно созданных человекоподобных слуг, сражающихся за свою свободу. Чешское слово «robota» означает «принудительное рабство». Слово «робототехника» было впервые применено известным автором научной фантастики Айзеком Азимовым в 1941 году.
Базовые компоненты робота
Компоненты робота: тело/рама, система управления, манипуляторы, и ходовая часть.
Тело/рама: Тело, или рама, робота может иметь любую форму и размер. Изначально, тело/рама обеспечивает конструкцию робота. Большинство людей знакомы с человекоподобными роботами, используемыми для съемок кинофильмов, но в действительность большинство роботов не имеют ничего общего с человеческим обликом. (Робонафт НАСА, представленный в предыдущем разделе, является исключением). Как правило, в проекте робота внимание уделяется функциональности, а не внешности.
Система управления:
Система управления робота является эквивалентом центральной нервной системы человека. Она предназначена для координирования управления всеми элементами робота. Датчики реагируют на взаимодействие робота с внешней средой. Ответы датчиков отправляются в центральный процессор (ЦП). ЦП обрабатывает данные с помощью программного обеспечения и принимает решения на базе логики. То же самое происходит при вводе пользовательской команды.
Манипуляторы:
Для выполнения задачи большинство роботов взаимодействует с внешней средой, а также окружающим миром. Иногда требуется перемещение объектов внешней среды без непосредственного участия со стороны операторов. Манипуляторы не являются элементом базовой конструкции робота, как его тело/рама или система управления, то есть робот может работать и без манипулятора. В настоящем учебном курсе акцент делается на тему манипуляторов, особенно блок 6.
Ходовая часть: Хотя некоторые роботы могут выполнять поставленные задачи, не изменяя свое местоположение, зачастую от роботов требуется способность перемещаться из одного места в другое. Для выполнения данной задачи роботу необходима ходовая часть. Ходовая часть представляет собой приводное средство перемещения. Роботы-гуманоиды оснащены ногами, тогда как ходовая часть практически всех остальных роботов реализована с помощью колес.
Возможности применения и примеры роботов
На сегодняшний день, роботы имеют массу применений. Области применения делятся на три основные категории:
- промышленные роботы;
- исследовательские роботы;
- образовательные роботы.
Промышленные роботы
В промышленности, для выполнения огромного количества работ необходимы высокая скорость и точность. В течение многих лет ответственность за выполнение подобных работ несли люди. С развитием технологий, использование роботов позволило ускорить и повысить точность многих производственных процессов. Это и упаковка, сборка, окраска и укладка на поддоны. Изначально, роботы выполняли только особые виды повторяющихся работ, где требовалось соблюдение простого заданного набора правил. Тем не менее, с развитием технологий промышленные роботы стали гораздо более подвижны, и теперь они способны принимать решения на основе сложного ответа от датчиков. Сегодня промышленные роботы часто оснащены системами технического зрения. К концу 2014 года международная робототехническая федерация прогнозировала объем применения промышленных роботов по всему миру свыше 1,3 миллиона единиц!

Роботы могут использоваться для выполнения сложных, опасных задач, а также задач, которые человек выполнить не в состоянии. Например, роботы способны обезвреживать бомбы, обслуживать ядерные реакторы, исследовать глубины океана и достигать самых дальних уголков космоса.
Исследовательские роботы
Роботы имеют широкое применение в мире исследований, так как их часто используют для выполнения задач, в решении которых человек беспомощен. Наиболее опасные и сложные среды находятся под поверхностью Земли. В целях изучения космического пространства и планет солнечной системы в НАСА на протяжении использовались космические аппараты, посадочные модули и вездеходы с функциями роботов.
Роботы Pathfinder и Sojourner
Для марсианской миссии Pathfinder была разработана уникальная технология, позволяющая осуществить доставку оборудованного посадочного модуля и роботизированного вездехода, Sojourner, на поверхность Марса. Sojourner был первым вездеходом, отправленным на планету Марс. Масса вездехода Sojourner на поверхности земли составляет 11 кг (24,3 фунта), на поверхности Марса - прибл. 9 фунтов, а его размеры сопоставимы с размерами детской коляски. Вездеход имеет шесть колес и может перемещаться со скоростью до 0,6 метров (1,9 футов) в минуту. Миссия была запущена на поверхности Марса 4 июля 1997 года. Pathfinder не только выполнил свою прямую задачу, но также вернулся на Землю с огромным количеством собранных данных и превысил свой проектный срок эксплуатации.

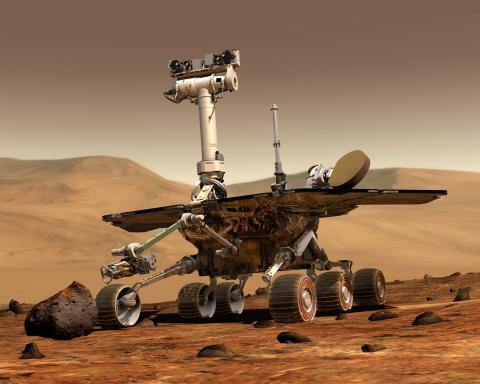
Вездеходы Spirit и Opportunity
Марсианские исследовательские вездеходы (MER) Spirit и Opportunity были отправлены на Марс летом 2003 года и приземлились в январе 2004 года. Их миссия состояла в исследовании и классификации большого количества камней и почв с целью обнаружения остатков воды на Марсе, в надежде на отправку на планету человеческой миссии. Несмотря на то, что запланированная длительность миссии составляла 90 дней, в действительности она превысила шесть лет. За это время было собрано бесчисленное количество геологических данных о Марсе.

Роботизированная рука космического корабля
Когда проектировщики НАСА впервые приступили к проектированию космического корабля, они столкнулись с задачей, выраженной в необходимости безопасной и эффективной доставки в космическое пространство огромного, но, к счастью, невесомого объема груза и оборудования. Система дистанционного манипулирования (RMS), или Канадарм (канадский дистанционный манипулятор), совершила свой первый выход в космос 13 ноября 1981 года.
Рука имеет шесть подвижных соединений, имитирующих человеческую руку. Два соединения расположены в плече, одно - в локте, и еще три - в кисти. На конце кисти установлено захватное устройство, способное захватывать или зацеплять требуемый груз. В условиях невесомости рука способна поднимать 586 000 фунтов груза и выполнять их размещение с удивительной аккуратностью. Общая масса руки на поверхности Земли составляет 994 фунта.
RMS использовалась для запуска и поиска спутников, а также оказалась бесценным помощником для астронавтов в процессе ремонта космического телескопа Хаббла. Последняя миссия Канадарм в составе космического корабля стартовала в июле 2011 года и стала девяностой миссией этого робота.

Мобильные обслуживающие системы
Мобильная обслуживающая система (MSS) представляет собой систему, аналогичную RMS, и известна также как Канадарм 2. Система была спроектирована для установки на международной космической станции в качестве объектного манипулятора. MSS предназначена для обслуживания оборудования и приборов, установленных на международной космической станции, а также для оказания помощи при транспортировке продовольствия и оборудования в пределах станции.

Dextre
В рамках космической миссии STS-123 в 2008, космический корабль Endeavor осуществлял перевозку последней части гибкого манипулятора специального назначения Dextre.
Dextre - это робот, оснащенный двумя не большими руками. Робот способен выполнять задачи по точной сборке, которые до этого выполняли астронавты во время входа в открытый космос. Dextre может транспортировать объекты, пользоваться инструментами и осуществлять установку или удаление оборудования на космической станции. Dextre также оснащен освещением, видео-оборудованием, инструментальной базой, а также четырьмя держателями для инструментов. Датчики позволяют роботу «чувствовать» объекты, с которыми он имеет дело, и автоматически реагировать на движения или изменения. Команда может наблюдать за работой с помощью четырех установленных камер.
По конструкции робот напоминает человека. Верхняя часть его тела может поворачиваться в талии, а плечи удерживают руки, расположенные с двух сторон.

Роботы в образовании
Робототехника стала увлекательным и доступным инструментом обучения и поддержки STEM, проектирования и подходов к решению задач. В робототехнике, учащиеся получают возможность реализовать себя в роли проектировщиков, артистов и техников одновременно, используя собственные руки и голову. За счет этого открываются огромные возможности применения научных и математических основ.
В современной системе образования, с учетом финансовых ограничений, средние и высшие школы находятся в постоянном поиске экономически выгодных путей преподавания сложных программ, сочетающих технологии с множеством дисциплин, учащимся для их подготовки к профессиональной деятельности. Преподаватели сразу видят преимущества робототехники и данного учебного курса, так как в них реализован межпредметный метод сочетания различных дисциплин. В дополнение, робототехника предлагает наиболее доступное и подходяще для повторного использования оборудование.
Сегодня более чем когда либо, школы применяют робототехнические программы в классе для "оживления" учебных курсов и обеспечения соответствия широкому спектру академических стандартов, необходимых для учащихся. Робототехника не только является уникальной и широкой базой для преподавания разнообразных технических дисциплин, но также областью техники, оказывающей значительное влияние на развитие современного общества.
Почему робототехника важна?
Как видно из раздела «Возможности применения и примеры роботов», робототехника является новой областью техники, применяемой во многих сферах жизни человека. Важным фактором развития общества является образованность всех его членов в части существующих технологий. Но это не единственная причина возрастающей значимости робототехники. Робототехника уникальным образом сочетает в себе основы дисциплин STEM (естественные науки, технологии, инженерия и математика). В процессе обучения в классе учащиеся изучают различные дисциплины и их взаимосвязи, используя современные, технологичные и увлекательные инструменты. Помимо этого, визуальное представление проектов, которое требуется от учащи, стимулирует их к экспериментам и проявлению изобретательности в процессе поиска эстетичных и работоспособных решений. Комбинируя эти аспекты работы, учащиеся поднимают свои знания и возможности на новый уровень.
Робототехник (Чешск. robot, от robota - подневольный труд и rob - раб) — специалист по разработке роботов и их обслуживанию. Профессия подходит тем, кого интересует физика, математика, черчение и информатика (см. выбор профессии по интересу к школьным предметам).
Особенности профессии
Робототехника (роботехника) - это прикладная научная отрасль, посвященная созданию роботов и автоматизированных технических систем. Такие системы также называют робототехническими системами (РТС). Ещё одно название - роботостроение. Так называют процесс создания роботов, по аналогии с машиностроением. Роботы особенно нужны там, где человеку работать слишком тяжело или опасно, и там, где каждое действие должно выполняться с нечеловеческой точностью. Например, робот может взять пробы грунта на Марсе, обезвредить взрывное устройство или провести точную сборку прибора.
Конечно, для каждого вида работы нужен специальный робот. Роботов-универсалов пока не существует. Всю робототехнику можно разделить на промышленную, строительную, авиационную, космическую, подводную, военную. Кроме этого существуют роботы-помощники, роботы для игр и т.д.
Робот может работать по заранее разработанной программе либо под управлением оператора. Роботов с самостоятельным мышлением и мотивацией, со своим эмоциональным миром и мировоззрением пока тоже нет. Оно и к лучшему.
Робототехника находится в родстве с мехатроникой.
Мехатроника - это дисциплина, посвящённая созданию и эксплуатации машин и систем с программным управлением. Часто мехатроникой называют электромеханику и наоборот.
К мехатронике относятся заводские станки с программным управлением, беспилотные транспортные средства, современная офисная техника и пр. Иными словами, приборы и системы, предназначенные для выполнения какой-то конкретной задачи. Например, задача офисного принтера - печать документов.
А что такое робот по своей сути?
Как видно из самого названия, робот изначально представлялся как подобие человека. Но прагматизм берёт верх. И чаще всего роботу отводится роль технического приспособления, для которого внешность не имеет большого значения. По крайней мере, промышленные роботы на людей совсем не похожи.
Однако у роботов есть признак, который объединяет их со всеми живыми существами - движение. И способ движения порой довольно чётко копирует то, что встречается в природе. Например, робот может летать, подобно стрекозе, бегать по стене, словно ящерица, ходить по земле, словно человек и пр.
(См. ролик внизу страницы.)
С другой стороны, некоторые роботы специально рассчитаны на душевный отклик людей. Например, роботы-собаки скрашивают жизнь людям, у которых нет времени на настоящую собаку. А плюшевые «младенцы» облегчают депрессию.
Не за горами то время, когда среди прочей бытовой техники у нас появятся роботы, помогающие по хозяйству. Лично я предпочла бы слугу в виде улыбчивого пластикового кокона на колёсах. Но кому-то наверняка захочется, чтобы их роботы-мажордомы были как настоящие люди. В этом направлении уже сделаны потрясающие успехи.
Создание робота - это то, чем занимается робототехник . Точнее, инженер-робототехник . Он исходит из того, какие задачи робот будет решать, продумывает механику, электронную часть, программирует его действия. Такая работа - не для одиночки-изобретателя, инженеры-робототехники работают в команде.
Но робота нужно не только изобрести и разработать. Его нужно обслуживать: управлять работой, следить за «самочувствием» и ремонтировать. Этим также занимается робототехник, но специализирующийся на обслуживании.
В основе современной робототехники находятся механика, электроника и программирование. Но, как подсказывают фантасты, со временем для изготовления роботов будут широко использовать био- и нанотехнологи. В результате получится киборг, т.е. кибернетический организм - что-то среднее между живым человеком и роботом. Чтобы не слишком радоваться по этому поводу, можно посмотреть фильм «Терминатор», любую его часть.
Начало истории роботов
Слово «робот» придумал Карел Чапек в 1920 г. и использовал его в своей пьесе «R.U.R.» («Россумские Универсальные Роботы»). Позже, в 1941 г., Айзек Азимов использовал слово «робототехника» в научно-фантастическом рассказе «Лжец».
Но видимо, одним из первых робототехников в истории человечества можно считать арабского изобретателя Аль-Джазари, жившего в XII веке. Остались свидетельства, что он создал механических музыкантов, которые развлекали публику, играя на арфе, флейте и бубнах. Леонардо да Винчи, живший в XV-XVI веках, оставил после себя чертежи механического рыцаря, способного двигать руками и ногами, открывать забрало своего шлема. Но эти выдающиеся изобретатели вряд ли могли представить, каких вершин достигнут технологии через несколько столетий.
Обучение на Робототехника
Чтобы стать робототехником, нужно получить высшее образование по направлению «мехатроника и робототехника». В частности, к этому направлению относится специальность «роботы и робототехнические системы». Высшее образование даёт квалификацию «инженер».
На этом курсе можно получить профессию специалиста по мехатронике и робототехнике за 3 месяца и 10 000 руб.
— Одна из самых доступных цен в России;
— Диплом о профессиональной переподготовке установленного образца;
— Обучение в полностью дистанционном формате;
— Сертификат соответствия профстандарту стоимостью 10 000 руб. в подарок!;
— Крупнейшее образовательное учреждение дополнительного проф. образования в России.
Сегодня занятия робототехникой становятся очень популярными. Школьникам такие уроки помогают сформировать и развить критическое мышление, научиться творчески подходить к процессу решения задач различного уровня сложности, а также получить навыки работы в команде.
Новое поколение
Современное образование переходит на новый виток своего развития. Многие педагоги и родители ищут возможность заинтересовать детей наукой, привить любовь к обучению и зарядить желанием творить и мыслить неординарно. Традиционные формы изложения материала уже давно утратили свою актуальность. Новое поколение не похоже на своих прародителей. Они хотят учиться живо, интересно, интерактивно. Это поколение легко ориентируется в современных технологиях. Дети хотят развиваться так, чтобы не только идти в ногу со стремительно развивающимися технологиями, но и непосредственно участвовать в этом процессе.
Многие из них интересуются: «Что такое робототехника? Где этому можно учиться?».
Образование и роботы
Эта учебная дисциплина включает в себя такие предметы, как конструирование, программирование, алгоритмику, математику, физику и другие дисциплины, связанные с инженерией. Ежегодно проводится World Robotics Olympiad (всемирная олимпиада по робототехнике - WRO). В образовательной сфере - это массовое соревнование, позволяющее лучше узнать, что такое робототехника для тех, кто впервые сталкивается с подобным предметом. Оно дает возможность попробовать свои силы участникам более чем из 50 стран. На соревнования съезжаются порядка 20 тысяч команд, в состав которых входят дети от 7 до 18 лет.
Основная цель WRO: развитие и популяризация НТТ (научно-технического творчества) и робототехники в молодежной и детской среде. Подобные олимпиады являются современным образовательным инструментом XXI века.
Новые возможности
Чтобы дети лучше понимали, что такое робототехника, на соревнованиях применяются теоретические и практические навыки, полученные на занятиях в рамках клубной работы и школьной программы по изучению естественно-научных предметов и точных наук. Увлеченность робототехнической дисциплиной постепенно перерастает в желание глубже узнать такие науки, как математика, физика, информатика и технологии.
WRO - это уникальная возможность для ее участников и наблюдателей не только узнать глубже что такое робототехника, но и развить в себе навыки творчества и критического мышления, которые так необходимы в XXI веке.

Обучение
Интерес к образовательной дисциплине робототехнического направления растет с каждым днем. Материальная база постоянно улучшается и развивается, многие идеи, еще недавно остававшихся мечтой - сегодня реальность. Изучение предмета «Основы робототехники» стало возможным для большого числа детей. На уроках ребята учатся решать задачи с ограниченными ресурсами, обрабатывать и усваивать информацию, а также использовать ее в правильном русле.
Дети учатся легко. Современное подрастающее поколение, воспитывающееся на различных гаджетах, как правило, не имеет трудностей в освоении дисциплины «Основы робототехники», при условии наличия желания и тяги к новым знаниям.
Нужно что даже взрослых людей сложнее переучивать, чем научить чистые, но жаждущие детские умы. Положительной тенденцией есть колоссальное внимание к популяризации робототехники в молодежной среде со стороны правительственных органов России. И это понятно, так как задача модернизации и привлечения молодых специалистов - это вопрос конкурентоспособности государства на международной арене.
Важность предмета
Сегодня актуальным вопросом Министерства образования стоит введение образовательной робототехники в круг школьных дисциплин. Она считается важным направлением развития. На уроках технологии дети должны получать представления о современной сфере развития техники и конструирования, которые дают им возможность самим придумывать и строить. Не обязательно всем ученикам становиться инженерами, но возможность должна быть у каждого.

Вообще, уроки робототехники крайне интересны детям. Это важно понимать всем - и учителям, и родителям. Такие занятия дают возможность увидеть другие дисциплины в ином свете, понять смысл их изучения. А ведь именно смысл, понимание того, зачем это нужно, движет умами ребят. Его отсутствие сводит на нет все усилия учителей и родителей.
Важным фактором является то, что обучение робототехнике - процесс не напрягающий и всецело поглощающий детей. Это не только развитие личности ученика, но и возможность уйти от улицы, неблагоприятной обстановки, праздного времяпровождения и влекущих за ним последствий.
Происхождение
Само название робототехники происходит от соответствующего английского robotics. Это прикладная наука, которая занимается разработкой технических автоматизированных систем. На производстве она является одной из главных технических основ интенсификации.
Все законы робототехники, как и сама наука, тесно связаны с электроникой, механикой, телемеханикой, механотроникой, информатикой, радиотехникой, электротехникой. Сама робототехника подразделяется на промышленную, строительную, медицинскую, космическую, военную, подводную, авиационную и бытовую.
Понятие «робототехника» впервые в своих рассказах использовал писатель-фантаст Это было в 1941 году (рассказ «Лжец»).
Само слово «робот» придумали в 1920 году чешский писатели и его брат Йозеф. Оно вошло в научно-фантастическую пьесу «Россумские универсальные роботы», которая была поставлена в 1921 году и пользовалась большим зрительским успехом. Сегодня можно наблюдать, как линия, обозначенная в пьесе, получила широкое развитие в свете научно-фантастической кинематографии. Суть сюжета: хозяин завода занимается разработкой и наладкой выпуска большого числа андроидов, способных работать без отдыха. Но эти роботы в итоге восстают против создателей.

Исторические примеры
Интересно, что зачатки робототехники появились ещё в античные времена. Об этом свидетельствуют останки движущихся статуй, которые были изготовлены в I веке до н.э. Гомер писал в «Илиаде» о сотворенных из золота служанок, способных говорить и мыслить. Сегодня разум, которым наделяют роботов, получил название - искусственный интеллект. Кроме того, древнегреческому инженеру-механику Архиту Тарентскому приписывают разработку и создание механического летающего голубя. Это событие датируется приблизительно 400 годом до н.э.
Таких примеров большое множество. Они хорошо раскрыты в книге Макарова И.М. и Топчеева Ю.И. «Робототехника: история и перспективы». В ней в популярной форме рассказано об истоках современных роботов, а также очерчена робототехника будущего и соответствующее развитие человеческой цивилизации.
Типы роботов
На современном этапе важнейшими классами роботов широкого назначения являются мобильные и манипуляционные.
Мобильный — это автоматическая машина с движущимся шасси и управляемыми приводами. Эти роботы могут быть шагающими, колёсными, гусеничными, ползающими, плавающими, летающими.
Манипуляционный — это автоматическая стационарная или передвижная машина, состоящая из манипулятора с несколькими степенями подвижности и программным управлением, выполняющим двигательные и управляющие функции в производстве. Такие роботы бывают в напольном, портальном или подвесном виде. Наибольшее распространение они получили на приборостроительных и машиностроительных производствах.

Способы перемещения
Большое распространение получили колёсные и гусеничные роботы. Перемещение шагающего робота представляет нелегкую задачу динамики. Такие роботы пока не могут иметь устойчивого движения, присущего человеку.
Относительно летающих роботов можно сказать, что большинство современных самолётов как раз ими являются, но управляются они пилотами. В то же время автопилот может контролировать полёт на всех стадиях. К летающим роботам относятся и их подкласс - крылатые ракеты. Такие аппараты имеют небольшой вес и выполняют опасные миссии, вплоть до ведения огня по команде оператора. Кроме того, есть проектные аппараты, способные к самостоятельному ведению огня.
Существуют летающие роботы, использующие методы движения, которые используют пингвины, медузы и скаты. Этот способ перемещения можно увидеть у роботов Air Penguin, Air Ray, Air Jelly. Их производит компания Festo. А вот роботы RoboBee используют методы полёта насекомых.
Среди ползающих роботов есть ряд разработок, подобных по перемещению червям, змеям и слизням. При этом робот использует силы трения на шероховатой поверхности или кривизну поверхности. Подобное перемещение полезно для узких пространств. Такие роботы нужны для поиска людей под обломками разрушенных зданий. Змееподобные роботы способны к перемещению в воде (такие, как ACM-R5 производства Японии).
Перемещающиеся по вертикальной поверхности роботы, используют такие подходы:
- подобные человеку, который взбирается на стену с выступами (Стэнфордский робот Capuchin);
- подобные гекконам, снабжённых вакуумными присосками (Wallbot» и Stickybot).
Среди плавающих роботов существует много разработок, перемещающимся по принципу подражания рыбам. Эффективность такого движения на 80% превосходит эффективность движения с гребным винтом. Подобные конструкции имеют низкий уровень шума и высокую маневренность. Этим они вызывают большой интерес у исследователей подводного пространства. К таким роботам относятся модели Эссекского университета - Robotic Fish и Tuna, разработанный институтом Field Robotics. Они смоделированы по движению, характерному для тунца. Среди роботов, имитирующих движение ската известна разработка фирмы Festo: Aqua Ray. А робот, движущийся как медуза, - это Aqua Jelly от того же разработчика.
Кружковая работа
Большинство кружков по робототехнике ориентированы на начальную и среднюю школу. Но и дети дошкольного возраста не обделены вниманием. Главную роль здесь играет развитие творчества. Дошкольники должны научиться мыслить свободно и воплощать свои идеи в творчестве. Именно поэтому занятия по робототехнике в кружках для детей до 6 лет направлены на активное использование кубиков и простых конструкторов.
Школьная программа, безусловно, усложняется. Она дает возможность познакомится с различными классами роботов, попробовать себя на деле, углубиться в науку. Новые дисциплины раскрывают потенциальные возможности ребенка для получения профессиональных навыков и знаний в выбранной области инженерии.

Робототехнические комплексы
Современное развитие робототехники находится в такой стадии, что, кажется, вот-вот произойдет мощный рывок в робототехнологиях. Это так же, как с видеосвязью и мобильными гаджетами. Еще недавно все это казалось недоступным для массового потребления. А сегодня - это обыденность, переставшая удивлять. Зато каждая выставка робототехники показывает нам фантастические проекты, которые захватывают дух человека от одной только мысли об их внедрении в жизнь общества.
В системе образования позволяют реализовать программу с применением проектной деятельности именно комплексные установки из роботов, среди которых популярны:

Управление
По типу управления системы бывают:
- биотехническими (командные, копирующие, полуавтоматические);
- автоматические (программные, адаптивные, интеллектуальные);
- интерактивные (автоматизированные, супервизорные, диалоговые).
К основным задачам управления роботами относятся:
- планирование движений и положений;
- планирование сил и моментов;
- идентификация динамических и кинематических данных;
- анализ динамической точности.
Большое значение в сфере робототехники имеет развитие методов управления. Это важно для технической кибернетики и теории автоматического управления.