 Vhod
VhodRelativnost mehanskega gibanja referenčnega sistema je kratka. Šolska enciklopedija
Teme Kodifikator enotnega državnega izpita: mehansko gibanje in njegove vrste, relativnost mehanskega gibanja, hitrost, pospešek.
Pojem gibanja je izjemno splošen in zajema največ širok krog pojavov. Študirajo fiziko različne vrste gibanja. Najenostavnejši med njimi je mehansko gibanje. Preučuje se v mehanika.
Mehansko gibanje
- to je sprememba položaja telesa (ali njegovih delov) v prostoru glede na druga telesa skozi čas.
Če telo A spremeni svoj položaj glede na telo B, potem telo B spremeni svoj položaj glede na telo A. Z drugimi besedami, če se telo A premakne glede na telo B, se telo B premakne glede na telo A. Mehansko gibanje je relativno- za opis gibanja je treba navesti, v zvezi s katerim telesom se obravnava.
Tako lahko na primer govorimo o gibanju vlaka glede na tla, potnika glede na vlak, muhe glede na potnika itd. Koncepta absolutnega gibanja in absolutnega mirovanja nista smiselna: potnik v mirovanju glede na vlak se bo premikal z njim glede na steber na cesti, naredil skupaj z Zemljo dnevno rotacijo in se gibal okoli Sonca.
Telo, glede na katerega obravnavamo gibanje, se imenuje referenčno telo.
Glavna naloga mehanika je določiti položaj gibajočega se telesa kadar koli. Za rešitev tega problema je priročno predstavljati gibanje telesa kot spremembo koordinat njegovih točk skozi čas. Za merjenje koordinat potrebujete koordinatni sistem. Za merjenje časa potrebujete uro. Vse to skupaj tvori referenčni okvir.
Referenčni okvir- to je referenčno telo skupaj s koordinatnim sistemom in uro, ki je togo povezana z njim ("zamrznjena" vanj).
Referenčni sistem je prikazan na sl. 1. Gibanje točke obravnavamo v koordinatnem sistemu. Izhodišče koordinat je referenčno telo.
 |
| Slika 1. |
Vektor se imenuje radijski vektor pike Koordinate točke so hkrati koordinate njenega polmernega vektorja.
Rešitev glavnega problema mehanike za točko je najti njene koordinate kot funkcije časa: .
V nekaterih primerih lahko prezrete obliko in velikost preučevanega predmeta in ga obravnavate preprosto kot premikajočo se točko.
Materialna točka
- to je telo, katerega dimenzije lahko zanemarimo v pogojih tega problema.
Tako lahko vlak štejemo za materialno točko, ko se premakne iz Moskve v Saratov, ne pa tudi, ko se vanj vkrcajo potniki. Zemljo lahko štejemo za materialno točko, ko opisujemo njeno gibanje okoli Sonca, ne pa tudi njene dnevno kroženje okoli lastne osi.
Značilnosti mehanskega gibanja vključujejo trajektorijo, pot, premik, hitrost in pospešek.
Trajektorija, pot, gibanje.
V nadaljevanju, ko govorimo o gibajočem se (ali mirujočem) telesu, vedno predpostavimo, da telo lahko jemljemo kot materialno točko. Posebej bomo obravnavali primere, ko idealizacije materialne točke ni mogoče uporabiti.
Trajektorija
- to je črta, po kateri se telo premika. Na sl. 1 je trajektorija točke moder lok, ki ga konec radijskega vektorja opisuje v prostoru.
Pot
- to je dolžina odseka trajektorije, ki jo preteče telo v določenem časovnem obdobju.
Premikanje
je vektor, ki povezuje začetni in končni položaj telesa.
Predpostavimo, da se je telo začelo gibati v točki in končalo gibanje v točki (slika 2). Potem je pot, ki jo prepotuje telo, dolžina trajektorije. Premik telesa je vektor.
 |
| Slika 2. |
Hitrost in pospešek.
Oglejmo si gibanje telesa v pravokotnem koordinatnem sistemu z osnovo (slika 3).
 |
| Slika 3. |
Naj bo v trenutku časa telo v točki s polmernim vektorjem
Po kratkem času se je telo znašlo na točki z
radijski vektor
Gibanje telesa:
(1)
Trenutna hitrost v trenutku - to je meja razmerja med gibanjem in časovnim intervalom, ko se vrednost tega intervala nagiba k nič; z drugimi besedami, hitrost točke je odvod njenega radijskega vektorja:
Iz (2) in (1) dobimo:
Koeficienti pri bazni vektorji v meji dajejo izpeljanke:
(Izpeljanka glede na čas je tradicionalno označena s piko nad črko.) Torej,
Vidimo, da so projekcije vektorja hitrosti na koordinatne osi odpeljanke koordinat točke:
Ko se približa ničli, se točka približa točki in vektor premika se obrne v smeri tangente. Izkazalo se je, da je v meji vektor usmerjen točno tangentno na trajektorijo v točki . To je prikazano na sl. 3.
Na podoben način se predstavi koncept pospeška. Naj bo hitrost telesa v trenutku enaka, po kratkem intervalu pa se hitrost izenači.
Pospešek
- to je meja razmerja med spremembo hitrosti in intervalom, ko se ta interval nagiba k nič; z drugimi besedami, pospešek je derivat hitrosti:
Pospešek je torej "stopnja spremembe hitrosti". Imamo:
Posledično so projekcije pospeškov izpeljanke projekcij hitrosti (in s tem druge izpeljanke koordinat):
Zakon seštevanja hitrosti.
Naj obstajata dva referenčna sistema. Eden od njih je povezan s stacionarnim referenčnim telesom. Ta referenčni sistem bomo označili in ga poimenovali nepremično.
Drugi referenčni sistem, označen z , je povezan z referenčnim telesom, ki se glede na telo giblje s hitrostjo . Temu pravimo referenčni okvir premikanje
. Dodatno predpostavimo, da se koordinatne osi sistema gibljejo vzporedno same s seboj (ni rotacije koordinatnega sistema), tako da lahko vektor štejemo za hitrost gibajočega sistema glede na mirujočega.
Fiksni referenčni okvir je običajno povezan z zemljo. Če se vlak gladko premika po tirnicah s hitrostjo , bo ta referenčni okvir, povezan z vagonom vlaka, premikajoči se referenčni okvir.
Upoštevajte, da je hitrost katerikoli točk avtomobila (razen vrtečih se koles!) je enako . Če muha nepremično sedi na neki točki v vozičku, se muha glede na tla giblje s hitrostjo . Muho nosi voziček, zato se imenuje hitrost gibljivega sistema glede na mirujočega prenosna hitrost .
Predpostavimo, da se muha plazi po kočiji. Hitrost leta glede na avtomobil (to je v gibljivem sistemu) je označena in imenovana relativna hitrost. Hitrost leta glede na tla (to je v mirujočem okvirju) je označena in imenovana absolutna hitrost .
Ugotovimo, kako so te tri hitrosti med seboj povezane – absolutna, relativna in prenosna.
Na sl. 4 muha je označena s piko.
- radius vektor točke v fiksnem sistemu;
- radius vektor točke v gibljivem sistemu;
- radij vektor referenčnega telesa v mirujočem sistemu.
 |
| Slika 4. |
Kot je razvidno iz slike,
Če diferenciramo to enakost, dobimo:
(3)
(odvod vsote je enak vsoti odvodov ne samo za primer skalarnih funkcij, ampak tudi za vektorje).
Odvod je hitrost točke v sistemu, to je absolutna hitrost:
Podobno je odvod hitrost točke v sistemu, to je relativna hitrost:
kaj je To je hitrost točke v mirujočem sistemu, to je prenosna hitrost premikajočega se sistema glede na mirujočega:
Kot rezultat, iz (3) dobimo:
Zakon dodajanja hitrosti. Hitrost točke glede na mirujoči referenčni sistem je enaka vektorski vsoti hitrosti gibajočega se sistema in hitrosti točke glede na gibajoči se sistem. Z drugimi besedami, absolutna hitrost je vsota prenosne in relativne hitrosti.
Torej, če se muha plazi po premikajočem se vozičku, je hitrost muhe glede na tla enaka vektorski vsoti hitrosti vozička in hitrosti muhe glede na voziček. Intuitivno očiten rezultat!
Vrste mehanskega gibanja.
Najenostavnejši vrsti mehanskega gibanja materialne točke sta enakomerno in premočrtno gibanje.
Gibanje se imenuje uniforma, če ostane velikost vektorja hitrosti konstantna (smer hitrosti se lahko spremeni).
Gibanje se imenuje naravnost
, če smer vektorja hitrosti ostane konstantna (in velikost hitrosti se lahko spremeni). Pot premočrtnega gibanja je ravna črta, na kateri leži vektor hitrosti.
Na primer, avto, ki potuje s konstantno hitrostjo po ovinkasti cesti, se giblje enakomerno (vendar ne linearno). Avto, ki pospešuje na ravnem odseku avtoceste, se premika premočrtno (vendar ne enakomerno).
Če pa pri premikanju telesa tako modul hitrosti kot njegova smer ostaneta konstantna, se imenuje gibanje enakomerno premočrtno.
V smislu vektorja hitrosti lahko podamo krajše definicije za te vrste gibanja:
Najpomembnejši posebni primer neenakomernega gibanja je enakomerno pospešeno gibanje, pri kateri ostaneta velikost in smer vektorja pospeška konstantni:
Poleg materialne točke mehanika upošteva še eno idealizacijo - togo telo.
Trdna -
To je sistem materialnih točk, razdalje med katerimi se skozi čas ne spreminjajo. Model togega telesa se uporablja v primerih, ko ne moremo zanemariti dimenzij telesa, lahko pa zanemarimo sprememba velikost in oblika telesa med gibanjem.
Najenostavnejši vrsti mehanskega gibanja trdnega telesa sta translacijsko in rotacijsko gibanje.
Gibanje telesa se imenuje progresivno,
če se katera koli premica, ki povezuje kateri koli dve točki telesa, premika vzporedno s prvotno smerjo. Pri translacijskem gibanju so trajektorije vseh točk telesa enake: dobijo se druga od druge z vzporednim premikom (slika 5).
 |
| Slika 5. |
Gibanje telesa se imenuje rotacijski , če vse njegove točke opisujejo kroge, ki ležijo v vzporednih ravninah. V tem primeru ležijo središča teh krogov na eni ravni črti, ki je pravokotna na vse te ravnine in se imenuje vrtilna os.
Na sl. 6 prikazuje kroglo, ki se vrti okoli navpična os. Tako običajno rišejo globus v ustreznih problemih dinamike.
 |
| Slika 6. |
Eden najpreprostejših fizikalni pojavi je mehansko gibanje teles. Kdo od vas še ni opazoval premikanja avtomobila, leta letala, ljudi, ki hodijo itd.! Če pa vprašate, ali se stavba, v kateri ste, trenutno premika, boste verjetno odgovorili, da se ne. In motili se boste!
Ali se letalo, ki ga vidite na nebu, zdaj premika? Če ste prepričani, da se premika, potem ste spet v zmoti! Če pa rečete, da miruje, potem v tem primeru vaš odgovor ne bo pravilen.
Kako ugotoviti, ali se določeno telo giblje ali ne? Če želite to narediti, morate najprej razumeti, kaj je mehansko gibanje.
Mehansko gibanje telesa je proces spreminjanja njegovega položaja glede na neko drugo telo, izbrano kot referenčno telo.
Referenčno telo- to je telo, glede na katerega se upošteva položaj drugih teles. Referenčno telo je izbrano poljubno. Lahko je karkoli: zemljišče, zgradba, avto, ladja itd.
Če želite presoditi, ali se telo (na primer letalo) premika ali ne, morate najprej izbrati referenčno telo, nato pa preveriti, ali se položaj zadevnega telesa glede na izbrano referenčno telo spremeni. V tem primeru se telo lahko premika glede na eno referenčno telo in se hkrati ne premika glede na drugo referenčno telo.
Na primer, oseba, ki sedi na vlaku, se premika glede na progo železnica, vendar glede na vagon miruje. Kamen, ki leži na tleh, glede na Zemljo miruje, giblje pa se (skupaj z Zemljo) glede na Sonce. Letalo na nebu se premika glede na oblake, vendar miruje glede na pilota, ki sedi na sedežu.
Zato je brez navedbe referenčnega telesa nemogoče govoriti o tem, ali se premika dano telo ali ne. Brez navedbe referenčnega telesa bo vsak vaš odgovor nesmiseln.
Ali stavba, v kateri ste zdaj, miruje? Odgovor na to vprašanje je odvisen od izbire referenčnega telesa. Če je referenčno telo Zemlja, potem da, miruje. Če pa je referenčno telo avtomobil, ki pelje mimo stavbe, potem se bo stavba glede nanj premaknila.
Kakšno vlogo imajo dimenzije telesa pri opisovanju njegovega gibanja? V nekaterih primerih je nemogoče storiti brez navedbe velikosti telesa in njegovih delov. Ko na primer avto zapelje v garažo, bosta velikost garaže in avtomobila za lastnika igrala pomembno vlogo. pomembno vlogo. Toda v mnogih situacijah velikost telesa ni pomembna. Če se na primer isti avtomobil premika iz Moskve v Sankt Peterburg in moramo izračunati čas gibanja avtomobila, potem nam bo vseeno, kakšne so njegove dimenzije.
Če so dimenzije telesa veliko manjše od razdalj, ki so značilne za obravnavano gibanje v problemu, potem dimenzije telesa zanemarimo in telo predstavimo v obliki materialna točka. Beseda "material" poudarja njegovo razliko od geometrijske točke. Geometrijska točka jih nima fizikalne lastnosti. Materialna točka ima lahko maso, električni naboj in nekatere druge lastnosti.
V sodobnem mehanika(teorija gibanja teles) drugače imenujemo materialne točke delci. V nadaljevanju bomo uporabljali oba izraza. Včasih, ko govorimo o mehanskem gibanju delcev, bomo uporabili izraz "telo", vendar ne smemo pozabiti, da to telo obravnavamo v pogojih, ko ga lahko vzamemo kot materialno točko.
Med premikanjem z enega mesta na drugo se delec (ali materialna točka) premika vzdolž določene črte. Premica, po kateri se delec giblje, se imenuje trajektorija.
Trajektorije imajo lahko različne oblike. Včasih je mogoče presoditi obliko trajektorije po vidni sledi, ki jo pusti premikajoče se telo. Takšne sledi včasih pustijo leteča letala ali meteorji, ki švigajo po nočnem nebu (slika 8). Oblika trajektorije je odvisna od izbire referenčnega telesa. Na primer, glede na Zemljo je pot Lune krog, glede na Sonce pa črta več kompleksna oblika(slika 9). 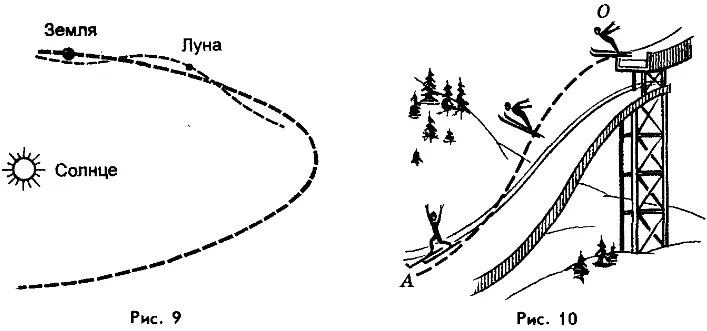 V nadaljevanju bomo obravnavali gibanje vseh teles (če ni navedeno drugače) glede na Zemljo.
V nadaljevanju bomo obravnavali gibanje vseh teles (če ni navedeno drugače) glede na Zemljo.
Trajektorije gibanja različna telesa se lahko med seboj razlikujejo ne le po obliki, ampak tudi po dolžini.
Dolžino poti, po kateri se je telo gibalo, imenujemo prevožena pot avtor.
Na sliki 10 je s črtkano črto prikazana tirnica smučarja pri skoku z odskočne deske. Dolžina trajektorije OA je pot, ki jo smučar prehodi med spustom z gore.
Pri merjenju poti se uporablja enota za pot. Enota za pot je enota za dolžino - meter(1 m). V praksi se uporabljajo druge enote dolžine, na primer:
1 km = 1000 m, 1 dm = 0,1 m, 1 cm = 0,01 m, 1 mm = 0,001 m.
1. Kaj je mehansko gibanje? 2. Katero telo imenujemo referenčno telo? 3. Zakaj je treba navesti, glede na katero referenčno telo se premika? 4. V katerih primerih lahko telo obravnavamo kot materialno točko? 5. Kako se drugače imenuje materialna točka? 6. Kaj je trajektorija? 7. Kako se pot razlikuje od trajektorije? 8. Kaj se pravzaprav giblje: Zemlja okoli Sonca ali Sonce okoli Zemlje? 9. Kdo je v gibanju: potnik, ki potuje v avtobusu, ali oseba, ki stoji pri avtobusna postaja? 10. Ali lahko globus štejemo za materialno točko?
Mehansko gibanje telesa je sprememba njegovega položaja glede na druga telesa v izbranem referenčnem sistemu, medtem ko se sprememba položaja telesa zgodi v določenem časovnem obdobju.
Referenčni sistem predpostavlja prisotnost referenčnega telesa v njem, referenčnega izvora (točke) na tem telesu, ki ima ničelno koordinato in vsaj eno koordinatno os. Naj bo na primer referenčno telo avtocesta, referenčna točka pa nek steber blizu nje. Koordinatna os se bo raztegnil vzdolž avtoceste; desno od ničle bo njegova pozitivna smer, levo - negativna. Naj bo bencinska črpalka 500 metrov od stebra v pozitivni smeri osi.
Recimo, da avtobus pelje po avtocesti proti bencinski črpalki. Če za referenčno točko vzamemo steber, se avtobus mehansko premika glede nanj, saj se razdalja med njima spreminja. Toda bencinska črpalka v izbranem referenčnem sistemu se ne premakne (njena razdalja do stebra se ne spremeni).
Sedaj bomo izbrali vodilo kot referenčni sistem, na njem bo izhodišče reference. Razdalja med njim in bencinsko črpalko je različna; Recimo, da se ji približa avtobus. Zdaj lahko rečemo, da bencinska črpalka spremeni svoj položaj glede na avtobus, kar pomeni, da se mehansko premakne.
Izkazalo se je, da je v enem referenčnem sistemu (avtobus) telo podvrženo mehanskemu gibanju, v drugem (avtocesta) pa ne. Zato tako pravijo mehansko gibanje relativno. S svojo relativnostjo pomenijo, da je prisotnost mehanskega gibanja mogoče oceniti le z navedbo določenega referenčnega okvira.
Poleg tega je hitrost mehanskega gibanja telesa odvisna od izbranega referenčnega sistema. Recimo, da glede na steber na avtocesti: avtobus vozi s hitrostjo 60 km/h, poleg njega pa se v isti smeri pelje avtomobil s hitrostjo 100 km/h. Kolikšna je hitrost avtomobila, če za referenčni okvir vzamemo avtobus? Čez eno uro bo avto od avtobusa oddaljen le še 40 km, kar pomeni, da je hitrost avtomobila v referenčnem sistemu, povezanem z avtobusom, 40 km/h.
Predstavljajte si osebo, ki sedi v avtobusu. Glede na drog na avtocesti se premika enako kot vsi deli avtobusa. Če za izhodišče izberemo poljubno mesto v samem avtobusu, potem sedeča oseba ne izvaja nobenega mehanskega gibanja, tj. miruje. V tem primeru imamo spet opravka z relativnostjo mehanskega gibanja.
Naj oseba v avtobusu vstane in se začne premikati. Zdaj izvaja mehansko gibanje v referenčnem okviru, povezanem z vodilom. Vendar bo hitrost osebe glede na drog na avtocesti in izbrano referenčno točko na avtobusu različna.
Kot mehanik preučuje interakcijo in gibanje teles. Glavna lastnost gibanja je gibanje v prostoru. Toda samo gibanje bo za različne opazovalce različno – to je relativnost mehanskega gibanja. Ko stojimo ob cesti in opazujemo premikajoči se avtomobil, vidimo, da se nam približuje ali oddaljuje, odvisno od smeri gibanja.
Z opazovanjem gibanja avtomobila ugotavljamo, kako se spreminja razdalja med opazovalcem in avtomobilom. Hkrati, če sedimo v avtu in se drug avto premika pred nami z enako hitrostjo, potem bo sprednji zaznan kot stoječ, ker razdalja med avtomobili se ne spreminja. Z vidika opazovalca, ki stoji ob cesti, se avtomobil premika; z vidika sopotnika avtomobil miruje.
Iz tega sledi, da vsak opazovalec ocenjuje gibanje na svoj način, tj. relativnost je določena s točko, s katere se opazuje. Zato za natančna definicija gibanje telesa, je treba izbrati točko (telo), s katere se bo gibanje ocenjevalo. Tu se nehote pojavi misel, da tak pristop k preučevanju gibanja otežuje razumevanje. Želeli bi najti neko točko, opazovano od katere bi bilo gibanje »absolutno« in ne relativno.
Študij fizike in fiziki so poskušali najti rešitev tega problema. Znanstveniki so z uporabo konceptov, kot sta "ravnomerno enakomerno gibanje" in "hitrost gibanja telesa", poskušali ugotoviti, kako bi se to telo gibalo glede na opazovalce, ki bi drugačna hitrost. Posledično je bilo ugotovljeno, da je rezultat opazovanja odvisen od razmerja med hitrostmi gibanja telesa in opazovalcev drug glede na drugega. Če je hitrost telesa večja, se oddaljuje, če je manjša, se približuje.
Za vse izračune so bile uporabljene formule klasična mehanika, povezovalna hitrost, prevožena pot in čas med enakomernim gibanjem. Naslednji očiten zaključek je: relativnost mehanskega gibanja je koncept, ki implicira enak potek časa za vsakega opazovalca. Formule, ki so jih pridobili znanstveniki, se imenujejo Bil je prvi v klasični mehaniki, ki je oblikoval koncept relativnosti gibanja.
Fizični pomen Galilejeve transformacije so izjemno globoke. Po klasični mehaniki njegove formule ne veljajo le za Zemljo, ampak za celotno vesolje. Naslednji sklep iz tega je, da je prostor povsod enak (homogen). In ker je gibanje enako v vseh smereh, ima prostor lastnosti izotropije, tj. njegove lastnosti so enake v vseh smereh.
Tako se izkaže, da iz najenostavnejšega premočrtnega enakomernega gibanja in koncepta relativnosti mehanskega gibanja izhaja izjemno pomemben zaključek (ali hipoteza): koncept "časa" je za vse enak, tj. je univerzalen. Iz tega tudi sledi, da je prostor izotropen in homogen, Galilejeve transformacije pa veljajo v celotnem vesolju.
Te nekoliko nenavadne ugotovitve izhajajo iz opazovanja mimo vozečih avtomobilov s strani ceste, pa tudi iz poskusov iskanja razlag za videno s formulami klasične mehanike, ki povezujejo hitrost, pot in čas. Izkazalo se je, da preprost koncept "relativnosti mehanskega gibanja" lahko vodi do globalnih zaključkov, ki vplivajo na osnove razumevanja vesolja.
Gradivo zadeva vprašanja klasična fizika. Obravnavana so vprašanja, povezana z relativnostjo mehanskega gibanja in sklepi, ki izhajajo iz tega koncepta.