 Entrée
EntréeLa relativité du mouvement mécanique du référentiel est brève. Encyclopédie scolaire
Sujets Codificateur d'examen d'État unifié: mouvement mécanique et ses types, relativité du mouvement mécanique, vitesse, accélération.
La notion de mouvement est extrêmement générale et couvre la plupart grand cercle phénomènes. Ils étudient en physique différents types mouvements. Le plus simple d’entre eux est le mouvement mécanique. Il est étudié dans mécanique.
Mouvement mécanique
- il s'agit d'un changement de position d'un corps (ou de ses parties) dans l'espace par rapport aux autres corps au fil du temps.
Si le corps A change de position par rapport au corps B, alors le corps B change de position par rapport au corps A. En d'autres termes, si le corps A se déplace par rapport au corps B, alors le corps B se déplace par rapport au corps A. Le mouvement mécanique est relatif- pour décrire un mouvement, il faut indiquer par rapport à quel corps il est considéré.
Ainsi, par exemple, on peut parler du mouvement d'un train par rapport au sol, d'un passager par rapport au train, d'une mouche par rapport à un passager, etc. Les notions de mouvement absolu et de repos absolu n'ont pas de sens : un passager au repos par rapport au train se déplacera avec lui par rapport à un pilier sur la route, effectuera avec la Terre une rotation quotidienne et se déplacera autour du Soleil.
Le corps par rapport auquel le mouvement est considéré est appelé corps de référence.
La tâche principale de la mécanique est de déterminer la position d'un corps en mouvement à tout moment. Pour résoudre ce problème, il convient d'imaginer le mouvement d'un corps comme un changement des coordonnées de ses points au fil du temps. Pour mesurer des coordonnées, vous avez besoin d'un système de coordonnées. Pour mesurer le temps, il faut une montre. Tout cela ensemble forme un cadre de référence.
Cadre de référence- il s'agit d'un corps de référence avec un système de coordonnées et une horloge qui lui est rigidement reliée (« figée »).
Le système de référence est représenté sur la Fig. 1. Le mouvement d'un point est considéré dans un système de coordonnées. L'origine des coordonnées est un corps de référence.
 |
| Graphique 1. |
Le vecteur s'appelle vecteur de rayon points Les coordonnées d'un point sont en même temps les coordonnées de son rayon vecteur.
La solution au problème principal de la mécanique d'un point est de trouver ses coordonnées en fonction du temps : .
Dans certains cas, on peut ignorer la forme et la taille de l’objet étudié et le considérer simplement comme un point en mouvement.
Point matériel
- c'est un corps dont les dimensions peuvent être négligées dans les conditions de ce problème.
Ainsi, un train peut être considéré comme un point matériel lorsqu'il se déplace de Moscou à Saratov, mais pas lorsque les passagers y montent. La Terre peut être considérée comme un point matériel pour décrire son mouvement autour du Soleil, mais pas son rotation quotidienne autour de son propre axe.
Les caractéristiques du mouvement mécanique comprennent la trajectoire, la trajectoire, le déplacement, la vitesse et l'accélération.
Trajectoire, chemin, mouvement.
Dans ce qui suit, lorsqu'on parle d'un corps en mouvement (ou au repos), on suppose toujours que le corps peut être pris comme un point matériel. Les cas où l'idéalisation d'un point matériel ne peut pas être utilisé seront spécialement discutés.
Trajectoire
- c'est la ligne le long de laquelle le corps se déplace. Sur la fig. Sur la figure 1, la trajectoire d'un point est un arc bleu, que l'extrémité du rayon vecteur décrit dans l'espace.
Chemin
- c'est la longueur du tronçon de trajectoire parcouru par le corps dans un laps de temps donné.
Mobile
est un vecteur reliant la position initiale et finale du corps.
Supposons que le corps commence à bouger en un point et termine son mouvement en un point (Fig. 2). Alors le chemin parcouru par le corps est la longueur de la trajectoire. Le déplacement d'un corps est un vecteur.
 |
| Graphique 2. |
Vitesse et accélération.
Considérons le mouvement d'un corps dans un système de coordonnées rectangulaires avec une base (Fig. 3).
 |
| Graphique 3. |
Supposons qu'à ce moment le corps se trouve en un point avec le rayon vecteur
Après une courte période de temps, le corps s'est retrouvé à un point où
vecteur de rayon
Mouvement du corps :
(1)
Vitesse instantanéeà un instant donné - c'est la limite du rapport du mouvement à un intervalle de temps lorsque la valeur de cet intervalle tend vers zéro ; en d'autres termes, la vitesse d'un point est la dérivée de son rayon vecteur :
De (2) et (1) on obtient :
Coefficients à vecteurs de base dans la limite ils donnent des dérivés :
(La dérivée par rapport au temps est traditionnellement indiquée par un point au-dessus de la lettre.) Ainsi,
On voit que les projections du vecteur vitesse sur les axes de coordonnées sont des dérivées des coordonnées du point :
Lorsqu'il s'approche de zéro, le point se rapproche du point et le vecteur déplacement tourne dans le sens de la tangente. Il s'avère que dans la limite, le vecteur est dirigé exactement de manière tangente à la trajectoire au point . Ceci est montré sur la Fig. 3.
Le concept d’accélération est introduit de la même manière. Supposons que la vitesse du corps soit égale à un moment donné, et après un court intervalle, la vitesse devient égale.
Accélération
- c'est la limite du rapport de la variation de vitesse à l'intervalle lorsque cet intervalle tend vers zéro ; en d'autres termes, l'accélération est la dérivée de la vitesse :
L’accélération est donc le « taux de changement de vitesse ». Nous avons:
Par conséquent, les projections d’accélération sont des dérivées des projections de vitesse (et, par conséquent, des dérivées secondes des coordonnées) :
La loi de l'addition des vitesses.
Soit deux systèmes de référence. L'un d'eux est associé à un corps de référence fixe. Nous désignerons ce système de référence et l'appellerons immobile.
Le deuxième système de référence, noté , est associé à un corps de référence qui se déplace par rapport au corps avec une vitesse de . Nous appelons ce cadre de référence mobile
. De plus, nous supposons que les axes de coordonnées du système se déplacent parallèlement à eux-mêmes (il n'y a pas de rotation du système de coordonnées), de sorte que le vecteur peut être considéré comme la vitesse du système en mouvement par rapport au système stationnaire.
Un référentiel fixe est généralement associé à la Terre. Si un train se déplace en douceur sur les rails à la vitesse , ce référentiel associé au wagon sera un référentiel mobile.
Notez que la vitesse n'importe lequel points de la voiture (sauf les roues qui tournent !) est égal à . Si une mouche reste immobile à un moment donné dans le chariot, alors par rapport au sol, la mouche se déplace à une vitesse de . La mouche est portée par le chariot, et donc la vitesse du système en mouvement par rapport au système stationnaire est appelée vitesse portative .
Supposons maintenant qu'une mouche rampe le long du chariot. La vitesse du vol par rapport à la voiture (c'est-à-dire dans un système en mouvement) est désignée et appelée vitesse relative. La vitesse d'une mouche par rapport au sol (c'est-à-dire dans un référentiel stationnaire) est notée et appelée vitesse absolue .
Découvrons comment ces trois vitesses sont liées les unes aux autres : absolue, relative et portable.
Sur la fig. 4 mouches sont indiquées par un point. Suivant :
- rayon vecteur d'un point dans un système fixe ;
- rayon vecteur d'un point dans un système en mouvement ;
- rayon vecteur du corps de référence dans un système stationnaire.
 |
| Graphique 4. |
Comme le montre la figure,
En différenciant cette égalité, on obtient :
(3)
(la dérivée d'une somme est égale à la somme des dérivées non seulement pour le cas des fonctions scalaires, mais aussi pour les vecteurs).
La dérivée est la vitesse d'un point du système, c'est-à-dire la vitesse absolue :
De même, la dérivée est la vitesse d'un point du système, c'est-à-dire la vitesse relative :
Qu'est-ce que c'est? Il s'agit de la vitesse d'un point dans un système stationnaire, c'est-à-dire la vitesse portable d'un système en mouvement par rapport à un système stationnaire :
En conséquence, de (3) on obtient :
Loi d'addition de vitesses. La vitesse d'un point par rapport à un référentiel fixe est égale à la somme vectorielle de la vitesse du système en mouvement et de la vitesse du point par rapport au système en mouvement. En d’autres termes, la vitesse absolue est la somme des vitesses portables et relatives.
Ainsi, si une mouche rampe le long d'un chariot en mouvement, alors la vitesse de la mouche par rapport au sol est égale à la somme vectorielle de la vitesse du chariot et de la vitesse de la mouche par rapport au chariot. Résultat intuitivement évident !
Types de mouvements mécaniques.
Les types de mouvement mécanique les plus simples d’un point matériel sont le mouvement uniforme et rectiligne.
Le mouvement s'appelle uniforme, si l'amplitude du vecteur vitesse reste constante (la direction de la vitesse peut changer).
Le mouvement s'appelle direct
, si la direction du vecteur vitesse reste constante (et l'amplitude de la vitesse peut changer). La trajectoire du mouvement rectiligne est une ligne droite sur laquelle se trouve le vecteur vitesse.
Par exemple, une voiture roulant à vitesse constante sur une route sinueuse effectue un mouvement uniforme (mais non linéaire). Une voiture qui accélère sur une section droite d’autoroute se déplace en ligne droite (mais pas uniformément).
Mais si, pendant le mouvement d'un corps, le module de vitesse et sa direction restent constants, alors le mouvement est appelé rectiligne uniforme.
En termes de vecteur vitesse, nous pouvons donner des définitions plus courtes pour ces types de mouvement :
Le cas particulier le plus important de mouvement irrégulier est mouvement uniformément accéléré, auquel l'amplitude et la direction du vecteur d'accélération restent constantes :
Parallèlement au point matériel, la mécanique considère une autre idéalisation : un corps rigide.
Solide -
Il s'agit d'un système de points matériels dont les distances ne changent pas dans le temps. Le modèle du corps rigide est utilisé dans les cas où l'on ne peut pas négliger les dimensions du corps, mais peut ignorer changement taille et forme du corps pendant le mouvement.
Les types de mouvements mécaniques les plus simples d’un corps solide sont les mouvements de translation et de rotation.
Le mouvement du corps s'appelle progressif,
si une ligne droite reliant deux points quelconques du corps se déplace parallèlement à sa direction d'origine. Lors du mouvement de translation, les trajectoires de tous les points du corps sont identiques : elles sont obtenues les unes des autres par un décalage parallèle (Fig. 5).
 |
| Graphique 5. |
Le mouvement du corps s'appelle rotation , si tous ses points décrivent des cercles situés dans des plans parallèles. Dans ce cas, les centres de ces cercles se trouvent sur une ligne droite perpendiculaire à tous ces plans et appelée axe de rotation.
Sur la fig. 6 montre une balle tournant autour axe vertical. C'est comme ça qu'ils dessinent habituellement globe dans les problèmes de dynamique correspondants.
 |
| Graphique 6. |
L'un des plus simples phénomènes physiques est le mouvement mécanique des corps. Qui d’entre vous n’a pas vu une voiture bouger, un avion voler, des gens marcher, etc. ! Cependant, si vous demandez si le bâtiment dans lequel vous vous trouvez est actuellement en train de déménager, vous répondrez probablement que non. Et vous aurez tort !
L’avion que vous voyez dans le ciel est-il en mouvement maintenant ? Si vous êtes sûr qu’il bouge, vous vous trompez encore ! Mais si vous dites qu'il est au repos, alors dans ce cas, votre réponse ne sera pas correcte.
Comment peut-on déterminer si un corps particulier bouge ou non ? Pour ce faire, il faut d’abord comprendre ce qu’est un mouvement mécanique.
Mouvement mécanique Le corps est le processus de changement de position par rapport à un autre corps choisi comme corps de référence.
Organisme de référence- c'est le corps par rapport auquel la position des autres corps est considérée. L'organisme de référence est choisi arbitrairement. Cela peut être n'importe quoi : un terrain, un bâtiment, une voiture, un bateau, etc.
Pour juger si un corps (par exemple, un avion) se déplace ou non, vous devez d'abord sélectionner un corps de référence, puis voir si la position du corps en question change par rapport au corps de référence sélectionné. Dans ce cas, un corps peut se déplacer par rapport à un corps de référence et en même temps ne pas bouger par rapport à un autre corps de référence.
Par exemple, une personne assise dans un train se déplace par rapport à la voie chemin de fer, mais est au repos par rapport au wagon. Une pierre posée au sol est au repos par rapport à la Terre, mais se déplace (avec la Terre) par rapport au Soleil. Un avion dans le ciel se déplace par rapport aux nuages, mais est au repos par rapport au pilote assis sur son siège.
C'est pourquoi, sans indiquer le corps de référence, il est impossible de dire s'il bouge corps donné ou non. Sans indiquer l’organisme de référence, toute réponse que vous donnerez n’aura aucun sens.
Le bâtiment dans lequel vous vous trouvez actuellement est-il au repos ? La réponse à cette question dépend du choix de l’organisme de référence. Si le corps de référence est la Terre, alors oui, elle est au repos. Mais si le corps de référence est une voiture passant devant le bâtiment, alors le bâtiment se déplacera par rapport à lui.
Quel rôle jouent les dimensions d’un corps dans la description de son mouvement ? Dans certains cas, il est impossible de se passer d'indiquer la taille du corps et de ses parties. Lorsque, par exemple, une voiture entre dans un garage, la taille du garage et de la voiture jouera un rôle important pour son propriétaire. rôle important. Mais il existe de nombreuses situations dans lesquelles la taille du corps n’a pas d’importance. Si, par exemple, la même voiture se déplace de Moscou à Saint-Pétersbourg et que nous devons calculer le temps qu'il lui faut pour se déplacer, nous ne nous soucierons pas de ses dimensions.
Si les dimensions du corps sont bien inférieures aux distances caractéristiques du mouvement considéré dans le problème, alors les dimensions du corps sont négligées et le corps est représenté sous la forme point matériel. Le mot «matériau» souligne sa différence d'un point de vue géométrique. Un point géométrique n'a pas propriétés physiques. Un point matériel peut avoir une masse, charge électrique et quelques autres caractéristiques.
Dans le moderne mécanique(théorie du mouvement des corps) les points matériels sont autrement appelés particules. Nous utiliserons ces deux termes dans ce qui suit. Parfois, en parlant du mouvement mécanique des particules, on utilisera le terme « corps », mais il ne faut pas oublier que ce corps est considéré dans des conditions où il peut être pris comme un point matériel.
En se déplaçant d'un endroit à un autre, une particule (ou un point matériel) se déplace le long d'une certaine ligne. La ligne le long de laquelle une particule se déplace s'appelle trajectoire.
Les trajectoires peuvent avoir différentes formes. Il est parfois possible de juger de la forme d'une trajectoire à la trace visible laissée par un corps en mouvement. De telles traces sont parfois laissées par des avions volants ou des météores traversant le ciel nocturne (Fig. 8). La forme de la trajectoire dépend du choix du corps de référence. Par exemple, par rapport à la Terre, la trajectoire de la Lune est un cercle, et par rapport au Soleil, c'est une ligne plus forme complexe(Fig. 9). 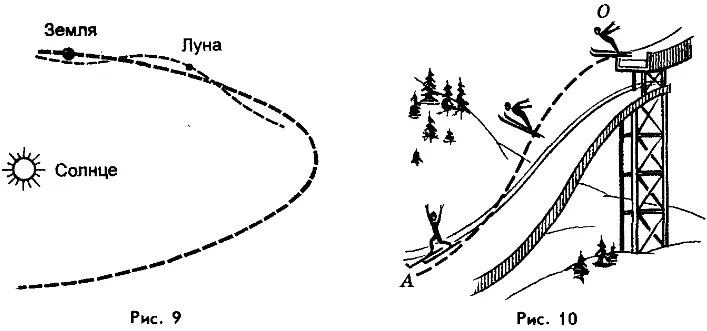 Dans ce qui suit, nous considérerons le mouvement de tous les corps (sauf indication contraire) par rapport à la Terre.
Dans ce qui suit, nous considérerons le mouvement de tous les corps (sauf indication contraire) par rapport à la Terre.
Trajectoires de mouvement différents corps peuvent différer les uns des autres non seulement par la forme, mais aussi par la longueur.
La longueur de la trajectoire le long de laquelle le corps s'est déplacé est appelée la distance parcourue. par.
Sur la figure 10, la ligne pointillée représente la trajectoire d'un skieur sautant d'un tremplin. La longueur de la trajectoire OA est le chemin parcouru par le skieur lors de la descente de la montagne.
Lors de la mesure d'un chemin, l'unité du chemin est utilisée. L'unité de chemin est l'unité de longueur - mètre(1 m). En pratique, d'autres unités de longueur sont utilisées, par exemple :
1 km = 1000 m, 1 dm = 0,1 m, 1 cm = 0,01 m, 1 mm = 0,001 m.
1. Qu’est-ce que le mouvement mécanique ? 2. Quel corps est appelé corps de référence ? 3. Pourquoi faut-il indiquer par rapport à quel corps de référence le mouvement s'effectue ? 4. Dans quels cas un corps peut-il être considéré comme un point matériel ? 5. Quel est l’autre nom d’un point matériel ? 6. Qu'est-ce qu'une trajectoire ? 7. En quoi un chemin diffère-t-il d’une trajectoire ? 8. Qu'est-ce qui bouge réellement : la Terre autour du Soleil ou le Soleil autour de la Terre ? 9. Qui est en mouvement : un passager voyageant dans un bus ou une personne debout à arrêt de bus? 10. Le globe peut-il être considéré comme un point matériel ?
Le mouvement mécanique d'un corps est un changement de sa position par rapport aux autres corps dans un cadre de référence choisi, tandis que le changement de position du corps se produit sur une période de temps.
Le système de référence présuppose la présence d'un corps de référence en lui, d'une origine (point) de référence sur ce corps, qui a une coordonnée zéro et au moins un axe de coordonnées. Par exemple, supposons que le corps de référence soit une autoroute et que le point de référence soit un certain pilier à proximité. Axe de coordonnées s'étendra le long de l'autoroute ; à droite de zéro sera sa direction positive, à gauche - négative. Soit une station service à 500 mètres du pilier dans le sens positif de l'axe.
Disons qu'un bus circule sur l'autoroute en direction d'une station-service. Si l'on prend le pilier comme point de référence, alors le bus effectue un mouvement mécanique par rapport à lui, puisque la distance entre eux change. Mais la station-service dans le référentiel choisi ne bouge pas (sa distance à la colonne ne change pas).
Nous allons maintenant choisir un bus comme système de référence ; l'origine de la référence sera située dessus. La distance entre lui et la station-service varie ; Disons qu'un bus s'approche d'elle. On peut désormais dire que la station-service change de position par rapport au bus, ce qui signifie qu'elle subit un mouvement mécanique.
Il s'avère que dans un référentiel (bus), le corps subit un mouvement mécanique, mais pas dans un autre (autoroute). C'est pourquoi ils disent ça mouvement mécanique relatif. Par sa relativité, ils signifient que la présence d'un mouvement mécanique ne peut être évaluée qu'en indiquant un cadre de référence spécifique.
De plus, la vitesse du mouvement mécanique du corps dépend du système de référence choisi. Supposons que, par rapport à un poteau sur l'autoroute : un bus roule à une vitesse de 60 km/h, et à côté de lui une voiture passe dans la même direction à une vitesse de 100 km/h. Quelle est la vitesse de la voiture si l’on prend le bus comme référentiel ? Dans une heure, la voiture ne sera qu'à 40 km du bus, ce qui signifie que la vitesse de la voiture dans le référentiel associé au bus est de 40 km/h.
Prenons l’exemple d’une personne assise dans un bus. Par rapport au poteau sur l'autoroute, il se déplace de la même manière que toutes les parties du bus. Si nous choisissons n'importe quel endroit dans le bus comme point de départ, alors la personne assise n'effectue aucun mouvement mécanique, c'est-à-dire qu'elle est au repos. Dans ce cas, nous avons à nouveau affaire à la relativité du mouvement mécanique.
Laissez la personne dans le bus se lever et commencer à bouger. Il effectue désormais un mouvement mécanique dans le référentiel associé au bus. Cependant, la vitesse de la personne par rapport au poteau sur l'autoroute et au point de référence choisi dans l'autobus sera différente.
En tant que mécanicien, il étudie l'interaction et le mouvement des corps. La principale propriété du mouvement est le mouvement dans l’espace. Mais le mouvement lui-même sera différent selon les observateurs : c'est la relativité du mouvement mécanique. Debout sur le bord de la route et observant une voiture en mouvement, nous voyons qu'elle s'approche de nous ou qu'elle s'éloigne, selon la direction du mouvement.
En observant le mouvement d'une voiture, nous déterminons comment la distance entre l'observateur et la voiture change. Dans le même temps, si nous sommes assis dans une voiture et qu'une autre voiture se déplace devant nous à la même vitesse, alors celle de devant sera perçue comme étant immobile, car la distance entre les voitures ne change pas. Du point de vue d'un observateur debout sur le bord de la route, la voiture est en mouvement ; du point de vue d'un passager, la voiture est à l'arrêt.
Il s'ensuit que chaque observateur évalue le mouvement à sa manière, c'est-à-dire la relativité est déterminée par le point à partir duquel l'observation est faite. Donc pour définition précise mouvement du corps, il est nécessaire de sélectionner un point (corps) à partir duquel le mouvement sera évalué. Ici, l'idée surgit involontairement qu'une telle approche de l'étude du mouvement rend sa compréhension difficile. On aimerait trouver un point, observé à partir duquel le mouvement serait « absolu » et non relatif.
Les étudiants en physique et les physiciens ont tenté de trouver une solution à ce problème. Les scientifiques, en utilisant des concepts tels que « mouvement rectiligne uniforme » et « vitesse de mouvement d'un corps », ont tenté de déterminer comment ce corps se déplacerait par rapport aux observateurs ayant vitesse différente. En conséquence, il a été constaté que le résultat de l'observation dépend du rapport entre les vitesses de mouvement du corps et des observateurs les unes par rapport aux autres. Si la vitesse du corps est plus grande, alors il s'éloigne ; si elle est moindre, alors il s'approche.
Pour tous les calculs, les formules ont été utilisées mécanique classique, la vitesse de connexion, la distance parcourue et le temps pendant un mouvement uniforme. La prochaine conclusion évidente est la suivante : la relativité du mouvement mécanique est un concept qui implique le même écoulement du temps pour chaque observateur. Les formules obtenues par les scientifiques sont appelées. Il fut le premier en mécanique classique à formuler le concept de relativité du mouvement.
Signification physique Les transformations de Galilée sont extrêmement profondes. Selon la mécanique classique, ses formules s’appliquent non seulement sur Terre, mais dans tout l’Univers. La conclusion suivante est que l’espace est partout le même (homogène). Et puisque le mouvement est le même dans toutes les directions, alors l'espace a les propriétés d'isotropie, c'est-à-dire ses propriétés sont les mêmes dans toutes les directions.
Ainsi, il s'avère que du mouvement uniforme rectiligne le plus simple et du concept de relativité du mouvement mécanique, découle une conclusion (ou hypothèse) extrêmement importante : le concept de « temps » est le même pour tout le monde, c'est-à-dire c'est universel. Il s’ensuit également que l’espace est isotrope et homogène, et que les transformations de Galilée sont valables dans tout l’Univers.
Ces conclusions quelque peu inhabituelles sont obtenues en observant les voitures qui passent depuis le bord de la route, ainsi qu'en tentant de trouver des explications à ce qui a été vu en utilisant les formules de la mécanique classique qui relient la vitesse, la trajectoire et le temps. Il s’avère que le simple concept de « relativité du mouvement mécanique » peut conduire à des conclusions globales affectant la compréhension fondamentale de l’Univers.
Le matériel concerne des questions physique classique. Les questions liées à la relativité du mouvement mécanique et les conclusions découlant de ce concept sont considérées.