 Entrada
EntradaRobots domésticos: una descripción general de los robots para diversos fines. tecnología robótica
Los escritores de ciencia ficción de los años 50 imaginaron el año 2000 con coches voladores y robots conviviendo con los humanos.
Como vemos, esto aún no ha sucedido, sin embargo, el campo de la robótica se ha desarrollado gradualmente a lo largo de las décadas, a veces rápidamente, luego su desarrollo disminuyó, pero ahora ha reanudado un crecimiento sin precedentes. Cada mes se producen miles de robots industriales diferentes, se desarrollan humanoides y androides, científicos de todo el mundo trabajan en la creación de inteligencia artificial y todo esto es solo el comienzo.
La robótica no es una industria independiente; en primer lugar, es una sinergia de todos los últimos avances en ciencias técnicas, naturales y tecnologías de la información.
Cuando decimos "robot", la gente está lejos de la tecnología y la imagina como en las películas de ciencia ficción soviéticas con brazos y piernas de hierro. Por supuesto, le damos a este concepto un significado mucho más amplio.
Destacar los siguientes grupos robots:
1. Industrial: cuando dicen "robótica", se refieren, en primer lugar, al desarrollo de esta área.
2. Militar - el único tipo, desarrollado en Rusia, también incluye robots para solucionar diversos accidentes y catástrofes naturales.
3. Espacio: estos incluyen satélites, rovers y robots antropomórficos que ayudan a los astronautas.
4. Hogar: limpiadores, robots de cocina, robots de compañía.
5. Androides, humanoides: varios robots antropomórficos, cuyo objetivo es mejorar la "humanidad" de los robots para diversos fines sociales.
historia de la robótica
La automatización y robotización de la producción en el mundo capitalista comenzó en los años 50 del siglo XX. Fue en esa época cuando se puede atribuir la aparición de los primeros robots industriales. Realizaron el montaje de equipos y las operaciones más sencillas y monótonas.
El primer robot de este tipo fue desarrollado por el inventor autodidacta George Devol en 1954. El brazo robótico pesaba dos toneladas y estaba controlado por un programa grabado en un tambor magnético. El sistema recibió el nombre de Unimate, se concedió una patente para el nuevo dispositivo y en 1961 el inventor fundó la empresa Unimation.
El primer robot se instaló en la planta de General Motors (en la fundición) en 1961. Luego, el nuevo producto fue probado por las fábricas de Chrysler y Ford,
 El sistema Unimate se utilizó para trabajar con piezas de metal fundido que el manipulador extraía de los moldes de fundición. El dispositivo de agarre estaba controlado por un accionamiento hidráulico.
El sistema Unimate se utilizó para trabajar con piezas de metal fundido que el manipulador extraía de los moldes de fundición. El dispositivo de agarre estaba controlado por un accionamiento hidráulico.
El robot tenía 5 grados de libertad y una pinza con dos “dedos”. La precisión del trabajo fue muy alta hasta 1,25 mm. Y era más eficiente que un humano: trabajaba más rápido y con menos defectos.
En 1967 llegaron a Europa manipuladores industriales. Ya están ampliando su funcionalidad, dominando la profesión de soldador y pintor. El robot adquiere “visión técnica” a través de cámaras de vídeo y sensores, aprende a determinar las dimensiones de los productos y su ubicación.
En 1982, IBM desarrolla un lenguaje oficial para la programación de robots. sistemas tecnicos. En 1984, Adept presentó el primer robot eléctrico, Scara.
El nuevo diseño hizo que los robots fueran más simples y confiables, manteniendo al mismo tiempo una alta velocidad.
En los años 90 apareció un controlador con una interfaz de control intuitiva que podía ser controlado por el operador, podía cambiar parámetros y ajustar el modo de funcionamiento. Desde entonces, las capacidades de controlar robots y sus funciones solo se han desarrollado, han aumentado su complejidad, velocidad, número de ejes y han comenzado a utilizarse. varios materiales, las posibilidades de desarrollo y gestión se ampliaron y se dieron los primeros pasos seguros hacia la inteligencia artificial.
 Al mismo tiempo, en la URSS era un líder en robótica. Todo empezó allá por los años 30. En 1936, Vadim Matskevich, un escolar soviético de 16 años, creó un robot que podía levantar derecha. Para ello, trabajó durante 2 años en los talleres de torneado de la Universidad Politécnica de Novocherkassk. Anteriormente, cuando tenía 12 años, creó un pequeño vehículo blindado radiocontrolado que disparaba fuegos artificiales. Las autoridades llamaron la atención sobre el "robot" de Matskevich y en 1937 lo presentó en la Exposición Mundial de 1937 en París.
Al mismo tiempo, en la URSS era un líder en robótica. Todo empezó allá por los años 30. En 1936, Vadim Matskevich, un escolar soviético de 16 años, creó un robot que podía levantar derecha. Para ello, trabajó durante 2 años en los talleres de torneado de la Universidad Politécnica de Novocherkassk. Anteriormente, cuando tenía 12 años, creó un pequeño vehículo blindado radiocontrolado que disparaba fuegos artificiales. Las autoridades llamaron la atención sobre el "robot" de Matskevich y en 1937 lo presentó en la Exposición Mundial de 1937 en París.
A finales de los años 30 y 40. Siglo XX En la URSS también aparecieron líneas automáticas para procesar piezas de rodamientos, ya finales de los años 40. Siglo XX Por primera vez en la práctica mundial, se creó una producción integral de pistones para motores de tractores con la automatización de todos los procesos, desde la carga de materias primas hasta el embalaje de productos terminados.
En 1966 se inventó en Vorónezh un manipulador para colocar láminas de metal; en 1968 se desarrolló en Leningrado un robot submarino "Manta" con un dispositivo de agarre sensible, que posteriormente fue mejorado; En 1969, el TsNITI del Ministerio de Industria de Defensa comenzó a desarrollar el robot industrial Universal-50. Posteriormente activo en Se estaban desarrollando sistemas automatizados para la producción a gran escala.
En 1985, ya se utilizaban 40.000 robots industriales, cifra que superaba varias veces el número utilizado en Estados Unidos. En AvtoVAZ en los años 80 las líneas automatizadas estaban en pleno funcionamiento e incluso fueron atacadas por trabajadores "hackers".

Hubo importantes avances militares y espaciales. Un logro único en ese momento fue el avión de reconocimiento no tripulado DBR-1, que fue adoptado por la Fuerza Aérea de la URSS en 1964. Un dispositivo de este tipo podría realizar misiones de reconocimiento en todo el territorio de Europa occidental y central.
Uno de los logros más notables de la robótica y la ciencia domésticas fue la creación de la Oficina de Diseño que lleva su nombre. Lavochkin "Lunokhod-1". Fue el aparato soviético el que se convirtió en el primer rover planetario del mundo que completó con éxito su misión en la superficie de otro cuerpo celeste.
En 1983, la Armada de la URSS adoptó el exclusivo complejo antibuque P-700 "Granit". Su peculiaridad era que durante el lanzamiento de una salva, los misiles podían formar de forma independiente una formación de batalla e intercambiar información entre sí durante el vuelo, distribuyendo objetivos de forma independiente. En este caso, uno de los misiles del complejo podría desempeñar el papel de líder, ocupando un escalón de ataque superior.
También se desarrollaron los “robots humanos”: en 1962 apareció el primer robot guía, Rex, que realizó excursiones para niños en Museo Politécnico. Dicen que todavía "trabaja" allí.
En la Unión Soviética se produjeron más de 100 mil unidades de robótica industrial. Reemplazaron a más de un millón de trabajadores, pero en los años 90 estos robots desaparecieron.
En el futuro, el desarrollo de la robótica avanza a un ritmo acelerado, porque se están desarrollando industrias clave: la física, la química, la ingeniería eléctrica y, lo más importante, la electrónica. Los tubos de vacío fueron reemplazados por electrónica de potencia, luego por microcircuitos y luego por microcontroladores... Están apareciendo nuevos materiales, nuevos métodos de automatización y métodos de programación.
Pero esto ya no se aplica a Rusia y la CEI. El desarrollo se produce principalmente en los Estados Unidos, el sudeste asiático y Europa occidental.
Se están introduciendo en la producción líneas robóticas controladas; los manipuladores robóticos se utilizan en todas las industrias, en agricultura, la medicina, en el espacio y, por supuesto, en la vida cotidiana.
En algunas industrias, hasta el 50% del trabajo lo realizan robots industriales; por ejemplo, en la industria automotriz, pueden soldar, pintar y mover piezas a otra área de ensamblaje, donde otros robots se encargarán de ellas.
Incluso hay fábricas 100% automatizadas. Hay una fábrica en Japón donde los robots ensamblan ellos mismos los robots. E incluso preparan comida para 2.000 personas: el centro de oficinas que atiende a esta planta.

En los años 90 hubo cierto declive. La introducción en la producción de robots que utilizan tecnologías existentes no produjo los beneficios esperados y se suspendió la financiación de algunos proyectos a gran escala. Por diversas razones, tanto económicas como sociales, el auge esperado no se produjo; siguieron siendo productos de nicho para las plantas de ensamblaje de automóviles y otras industrias.
Sólo a mediados de la década de 2000 se produjo un salto brusco y esta evolución continúa. En primer lugar, debido al hecho de que los militares se interesaron por la robótica...
Es imposible detener el desarrollo y todos los países que quieran estar a la vanguardia de la industria global tienen que aceptarlo y ponerse al día.
Diseño de robots y tareas de robótica.
Hay seis tareas generales de la robótica:
- Movimiento: movimiento en cualquier entorno.
- Orientación: ser consciente de su ubicación
- Manipulación: manipular libremente objetos en el entorno.
- Interacción: contacto con otras personas como usted
- Comunicación: comunicarse libremente con una persona.
- Inteligencia artificial: el robot debe decidir de forma independiente cómo ejecutar una orden humana
El movimiento más óptimo de un robot sobre ruedas y una plataforma con orugas. Son estos métodos los que proporcionan la mayor estabilidad y maniobrabilidad.
La capacidad de cross-country es más difícil para las plataformas con ruedas: la rueda no puede superar un obstáculo mayor que su radio. Se mejoran constantemente los diseños de las ruedas, se utilizan potentes servomotores, se desarrollan suspensiones independientes y se utilizan neumáticos con ruedas.
Los robots cuadrúpedos e insectomorfos son estables (es decir, con forma de insecto, con varias “patas”, normalmente 6). Estos dispositivos se utilizan a menudo con fines militares.
Al robot le llevó mucho tiempo aprender a caminar sobre dos piernas. De todos los existentes, sólo el humanoide ASIMO de Honda se adapta bien a esto; no sólo puede caminar con paso firme, sino también subir escaleras; la empresa lo ha estado desarrollando durante más de 25 años;
La mayoría de los robots humanoides todavía se mueven sobre una plataforma.
Además de caminar sobre el suelo, ciertos modelos pueden gatear, nadar y volar.
El robot se orienta en el espacio mediante sensores y cámaras de vídeo y tiene la capacidad de “ver” en el rango de infrarrojos, detectar vibraciones ultrasónicas y percibir radiación térmica.
El operador también puede controlarlo; puede estar en la misma habitación o a varios kilómetros de distancia.
Todos los problemas planteados por la robótica se están resolviendo en un grado u otro. El robot se vuelve más perfecto, sabe cooperar con otros robots, aprende a comunicarse con una persona y a comprenderla mejor.
Un esquema interesante para entrenar un satélite robot espacial; probablemente se utilice el mismo principio para configurar otros sistemas robóticos. “Aprendizaje emocional”, como lo llaman los desarrolladores. Su esencia es que contiene un "aparato emocional" que le dice al acompañante qué es "bueno" y qué es "malo" para él. Bueno - si apunta a un objeto específico determinado - esto aumentará la puntuación, malo - si se desvía de él - la puntuación se reducirá. Bueno, y así sucesivamente hasta que el dispositivo se estabilice "bien".
Esto podría resultar útil, por ejemplo, para los telescopios espaciales. La formación se lleva a cabo con la ayuda de un operador y dura unos 20 minutos, el resultado se muestra en la base de conocimientos.
Este dispositivo particular descrito por un astronauta puede ser lanzado a espacio abierto: El satélite realizará el resto de acciones por sí mismo. El concepto ha desarrollado un modelo del sistema nervioso, que lógicamente se deriva de las condiciones en las que opera el sistema nervioso de todos los organismos vivos.
La robótica del futuro podrá recopilar nuevos conocimientos de forma independiente, analizarlos y aplicarlos en la práctica.
La robótica está conquistando cada vez más industrias en la actualidad y se está introduciendo cada vez más en varias áreas vida humana. Y si antes los robots podían desempeñar el papel de una persona, reemplazándola en las fábricas, donde a menudo se requieren acciones monótonas durante la producción en cadena, por ejemplo, en la producción de automóviles, ahora ha llegado el momento en que se pueden encontrar robots en todos los hogares. para ayudar a una persona a resolver problemas urgentes y ayudar a ahorrar tiempo y esfuerzo.
Robots domésticos diseñados para ayudar a las personas en sus la vida cotidiana, están ganando cada vez más popularidad, lo que no es nada sorprendente, porque la variedad de robots crece cada año. Hoy en día, estos incluyen aspiradoras, cortadoras de césped, limpiacristales, limpiadores de piscinas e incluso robots quitanieves.
Por cierto, en 2007, Bill Gates llamó la atención sobre el importante potencial de esta área tecnológica al publicar el artículo "Un robot en cada hogar", donde reflejaba las perspectivas que se abrirían a la sociedad gracias a la introducción de los robots domésticos. .
El tema de este artículo será breve descripción general Tipos de robots domésticos que están ganando popularidad. Veremos varios robots diseñados para diferentes aplicaciones domésticas, veremos cómo funcionan, qué pueden hacer, cómo deben usarse y qué tan fáciles de manejar.

Dado que el robot aspirador es un dispositivo autónomo, necesariamente está equipado no solo con una batería, sino también con una cámara que le ayuda a navegar por la habitación para no limpiar el mismo lugar dos veces.
El robot simplemente crea previamente un mapa de limpieza óptimo, basado en los datos de la cámara, luego procede directamente a la limpieza, después de lo cual regresa al punto de partida asociado con el cargador.
A bordo de la aspiradora se encuentran todos los sensores necesarios (incluido un giroscopio), que permiten al dispositivo medir la distancia a un obstáculo, estimar la altura de la base del mueble sobre el piso (si se puede mover debajo de él), detectar un colisión, determinar la presencia de un colector de polvo en el lugar, etc. La electrónica inteligente permite que el robot navegue normalmente entre muebles y paredes mientras trabaja.
El colector de polvo es compacto y está situado cerca de los cepillos. Para moverse, el robot utiliza dos ruedas con las que puede girar. Dos cepillos guía barren los residuos hacia el cepillo turbo, que a su vez los dirige al depósito de polvo, donde el dispositivo de succión finalmente captura los residuos. Todo este equipo funciona con una capacidad de varios amperios-hora.
Gracias a la presencia de un giroscopio, el robot aspirador siempre “sabe” su ángulo de inclinación y, por tanto, no hay posibilidad de que se atasque. El único inconveniente de estos robots aspiradores es baja fuerza succión. Son adecuados para limpiar revestimientos de suelos lisos, como linóleo o laminado, pero es poco probable que puedan limpiar alfombras muy sucias.
En cualquier caso, un robot aspirador puede hacernos la vida mucho más fácil. Cada vez que una persona ve polvo en el suelo, ya no tiene que correr a buscar una escoba para barrerlo. Basta con programar el robot para una limpieza periódica, y éste realizará de forma independiente el mantenimiento preventivo en todo el apartamento, casa o incluso oficina.

Hay dos tipos de robots limpiacristales. El primer tipo es un robot formado por dos partes, una de las cuales contiene la electrónica de control y la otra el mecanismo de limpieza. Las dos piezas están unidas al cristal de la ventana desde lados diferentes y se sujetan mediante imanes permanentes.
Primero, el robot se marca un mapa con el que trabajar, llegando primero a cada borde del vidrio, midiendo así el tamaño de la superficie a lavar, luego comienza a lavarlo moviéndose en zigzag.
Cuatro almohadillas de microfibra sirven como herramientas de limpieza y el movimiento se logra mediante la interacción de imanes permanentes y el módulo de control.
En el centro, entre las almohadillas, hay un orificio por donde sale el detergente. El dispositivo funciona con una batería de litio incorporada. Todo lo que una persona necesita hacer es poner en marcha la máquina, y él mismo hará todo, utilizando el detergente precargado en un tanque especial.

El segundo tipo de robot limpiacristales es un robot con ventosas. Un robot de este tipo tiene sólo un módulo de trabajo para un lado de la ventana.
Básicamente, el robot limpia el vidrio moviéndose hacia la izquierda y hacia la derecha a lo largo de su superficie, sin el uso de almohadillas giratorias. Utiliza una servilleta reemplazable, que primero debe humedecerse con detergente a mano.
El robot se alimenta de la red eléctrica, aunque realiza su trabajo de forma autónoma una vez lo enciendes y lo instalas en el cristal; Hay una batería de respaldo en caso de un corte de energía en la casa. El usuario sólo tiene que instalar el robot sobre el cristal y encenderlo.

El principio de funcionamiento de estos robots es el siguiente. El primer paso es tender un cable limitador a través del cual fluye corriente continua y que define el límite del área de trabajo del robot cortacésped. Este cortacésped autónomo está equipado con todos los sensores necesarios, incluidos sensores de obstáculos, como los robots aspiradores, para que el cortacésped pueda evitar un árbol, un bordillo o un macizo de flores.
El cable limitador es necesario para garantizar que el cortacésped no caiga en un estanque o intente cortar las piedras del camino del jardín, causándose así daños. Cables cercan el perímetro, macizos de flores, caminos de piedra y estanques.
Durante el funcionamiento, el cortacésped se mueve caóticamente por el área dentro del perímetro, cortando el césped con cuchillos. Algunos modelos no se mueven de forma caótica, sino en espiral o en zigzag, depende del fabricante.
Los parámetros de los robots cortacésped son diferentes. En primer lugar, el ancho de trabajo. De acuerdo, con un ancho de trabajo de 56 cm, en comparación con 24 cm, el trabajo se completará más rápido. El poder también importa.
Un cortacésped con una potencia de 500 vatios y un ancho de trabajo de 56 cm cubrirá la misma superficie mucho más rápido que un modelo de 100 vatios. La batería aquí ciertamente determina el área que el robot puede cubrir con una sola carga. Hay cortacésped robóticos diseñados para 4 hectáreas y los hay para las 30 hectáreas.
¿El kit viene con base de carga para que el cortacésped pueda levantarse solo, recargarse y seguir trabajando? El consumidor debe prestar atención a esto al elegir un modelo; de lo contrario, tendrá que cargar él mismo el robot, lo que no siempre es conveniente.
Si hay una estación base de carga, una persona podrá programar el cortacésped para toda la temporada y no preocuparse por el horario de corte del césped.

El robot dispone de un cable de alimentación y un par de ruedas para desplazarse por el fondo y las paredes de la piscina. Dependiendo de la longitud del cable se normaliza el tamaño de la piscina que puede manejar el robot. Los cepillos del robot giran independientemente de las ruedas y eliminan fácilmente la mucosidad y la suciedad dirigiéndolas a través del filtro.
El agua junto con la suciedad se aspira hacia el compartimento del filtro del robot, luego el agua se devuelve a la piscina y la suciedad se deposita en el filtro. Luego sólo tienes que sacar el filtro y enjuagarlo con agua.
El robot limpiapiscinas primero limpia el fondo y luego se desplaza por las paredes, pegándose a ellas. Así, el 70% del tiempo se dedica a limpiar el fondo y el 30% a limpiar las paredes de la piscina. Una piscina típica tiene una superficie de fondo de 28 metros cuadrados. un robot promedio limpiará en 2-3 horas.
A pesar de que el agua pasa por el filtro del robot, siendo aspirada por su bomba, el propietario de la piscina deberá utilizar como siempre el sistema de depuración del agua de la piscina, el robot no lo sustituirá, sólo limpiará las superficies, pero no; el agua misma. Sin embargo, el robot aliviará a su propietario no sólo de la necesidad de limpiar la piscina manualmente, sino también de observar el proceso de limpieza.

Finalmente, un robot quitanieves es la solución más relevante para nuestras latitudes. En lugar de agitar una pala por donde no pueden pasar grandes equipos quitanieves, un robot quitanieves le ayudará. El robot se controla desde un teléfono inteligente a través de Wi-Fi y parece un juego interactivo.
Subir y bajar la cuchara, moverse hacia adelante y hacia atrás sobre las orugas, girar: todo esto lo puede hacer el robot, que el operador controla de forma remota, incluso mientras está cómodamente sentado en casa frente al ordenador.
Los ojos del robot son una cámara de vídeo, a través de la cual el usuario puede evaluar la situación para luego guiar al robot a realizar los trabajos de retirada de nieve.
Una batería de gran capacidad cargada desde un tomacorriente le permitirá limpiar la nieve durante varias horas sin tener que transportar la nieve manualmente, especialmente si estamos hablando de sobre la limpieza de grandes áreas, cerca de edificios, donde los equipos de remoción de nieve simplemente no pueden llegar.
Como puede ver, la gama de robots domésticos en la actualidad es bastante amplia y cada persona seguramente encontrará entre los disponibles en el mercado exactamente lo que le hará la vida más fácil. Algunas personas necesitan limpiar periódicamente la piscina de su jardín en verano, mientras que otras están cansadas de quitar la nieve en invierno.
Cualquiera que tenga animales en casa se planteará adquirir un robot aspirador, algunos de los cuales se llevan bien con los animales. Si vives en una zona con aire muy contaminado y las ventanas se llenan de polvo con frecuencia, el robot te ayudará a lavarlas. ¿Qué podemos decir de un robot cortacésped que permitirá a su propietario hacer otras cosas más? asuntos importantes o simplemente relájate mientras el robot cuida el césped.
Andrey Povny
Un robot es un dispositivo mecánico programable que es capaz de realizar tareas e interactuar con el entorno externo sin ayuda humana. La robótica es la base científica y técnica para el diseño, producción y aplicación de robots.
La palabra "robot" fue utilizada por primera vez por el dramaturgo checo Karl Capek en 1921. Su obra Rossum's Universal Robots trataba sobre una clase de esclavos, sirvientes humanoides creados artificialmente que luchaban por su libertad. La palabra checa "robota" significa "esclavitud forzada". La palabra "robótica" fue utilizada por primera vez por un autor famoso. ciencia ficción Isaac Asimov en 1941.
Componentes básicos del robot
Componentes del robot: cuerpo/bastidor, sistema de control, manipuladores y chasis.
Cuerpo/bastidor: El cuerpo o estructura del robot puede tener cualquier forma y tamaño. Inicialmente, el cuerpo/bastidor proporciona la estructura del robot. La mayoría de la gente está familiarizada con robots humanoides, utilizado para filmar películas, pero en realidad la mayoría de los robots no tienen nada en común con una forma humana. (La Robonaft de la NASA, presentada en la sección anterior, es una excepción). Normalmente, el diseño de un robot se centra en la funcionalidad más que en la apariencia.
Sistema de control: El sistema de control del robot es el equivalente al sistema nervioso central humano. Está diseñado para coordinar el control de todos los elementos del robot. Los sensores reaccionan a la interacción del robot con el entorno externo. Las respuestas del sensor se envían a la unidad central de procesamiento (CPU). La CPU procesa datos mediante software y toma decisiones basadas en la lógica. Lo mismo sucede cuando ingresas un comando personalizado.
Manipuladores: Para completar una tarea, la mayoría de los robots interactúan con el entorno externo y con el mundo que los rodea. A veces es necesario mover objetos ambientales sin la participación directa de los operadores. Los manipuladores no son un elemento del diseño básico del robot, como su cuerpo/estructura o sistema de control, es decir, el robot puede funcionar sin manipulador. Este curso se centra en el tema de los manipulativos, especialmente la Unidad 6.
Chasis: Aunque algunos robots pueden realizar tareas asignadas sin cambiar su ubicación, a menudo se requiere que los robots puedan moverse de un lugar a otro. Para realizar esta tarea, el robot necesita un chasis. El chasis es un medio motriz de movimiento. Los robots humanoides están equipados con patas, mientras que el tren de rodaje de casi todos los demás robots se realiza mediante ruedas.
Aplicaciones y ejemplos de robots.
Hoy en día, los robots tienen muchas aplicaciones. Las aplicaciones se dividen en tres categorías principales:
- robots industriales;
- robots de investigación;
- robots educativos.
robots industriales
En la industria, se requiere alta velocidad y precisión para realizar una gran cantidad de trabajos. Durante muchos años, las personas eran responsables de realizar este trabajo. Con el desarrollo de la tecnología, el uso de robots ha permitido acelerar y mejorar la precisión de muchos procesos de producción. Esto incluye embalaje, montaje, pintura y paletizado. Inicialmente, los robots sólo realizaban tipos especiales trabajos repetitivos que requerían el cumplimiento de un conjunto simple de reglas. Sin embargo, con los avances tecnológicos, los robots industriales se han vuelto mucho más ágiles y ahora son capaces de tomar decisiones basadas en retroalimentación compleja de sensores. Hoy en día, los robots industriales suelen estar equipados con sistemas de visión. A finales de 2014, la Federación Internacional de Robótica predijo que el uso de robots industriales en todo el mundo superaría los 1,3 millones de unidades.

Los robots se pueden utilizar para realizar tareas complejas y peligrosas o tareas que los humanos no pueden realizar. Por ejemplo, los robots son capaces de desactivar bombas, servir reactores nucleares, explora las profundidades del océano y llega a los confines más lejanos del espacio.
robots de investigación
Los robots tienen una amplia gama de aplicaciones en el mundo de la investigación, ya que a menudo se utilizan para realizar tareas que los humanos no podemos realizar. Los entornos más peligrosos y complejos se encuentran debajo de la superficie de la Tierra. Con el fin de estudiar el espacio exterior y los planetas. sistema solar han sido utilizados por la NASA durante mucho tiempo astronave, módulos de aterrizaje y rovers con funciones robóticas.
Robots Pathfinder y Sojourner
Para la misión Pathfinder a Marte, se desarrolló una tecnología única para llevar un módulo de aterrizaje y un rover robótico equipado, Sojourner, a la superficie de Marte. Sojourner fue el primer rover enviado al planeta Marte. El rover Sojourner pesa 11 kg (24,3 lb) en la superficie de la Tierra y aprox. Pesa 9 libras y es comparable en tamaño a un cochecito de bebé. El vehículo todoterreno tiene seis ruedas y puede moverse a velocidades de hasta 0,6 metros (1,9 pies) por minuto. La misión fue lanzada a la superficie de Marte el 4 de julio de 1997. Pathfinder no sólo completó la misión prevista, sino que también regresó a la Tierra con una enorme cantidad de datos recopilados y superó su vida útil.

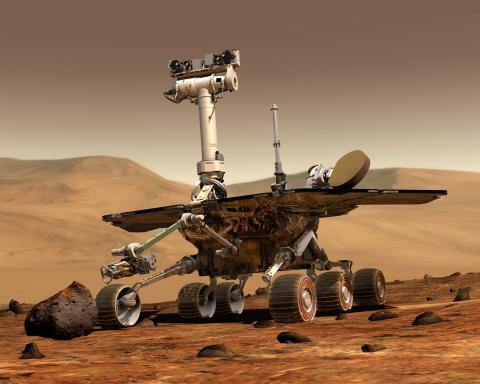
Vehículos todo terreno Espíritu y Oportunidad
Los Mars Exploration Rovers (MER) Spirit y Opportunity fueron enviados a Marte en el verano de 2003 y aterrizaron en enero de 2004. Su misión era examinar y clasificar grandes cantidades de rocas y suelos para descubrir rastros de agua en Marte, con la esperanza de enviar una misión humana al planeta. Aunque la duración prevista de la misión era de 90 días, en realidad superó los seis años. Durante este tiempo se recopilaron innumerables datos geológicos sobre Marte.

Brazo robótico de una nave espacial.
Cuando los diseñadores de la NASA comenzaron a diseñar la nave espacial, se enfrentaron al desafío de transportar de manera segura y eficiente un volumen enorme, pero afortunadamente ingrávido, de carga y equipo al espacio. El Sistema de Manipulación Remota (RMS), o Canadarm (Canadian Remote Manipulator), realizó su primera caminata espacial el 13 de noviembre de 1981.
La mano tiene seis articulaciones móviles que simulan la mano humana. Dos articulaciones se encuentran en el hombro, una en el codo y tres más en la mano. En el extremo de la mano hay un dispositivo de agarre capaz de agarrar o enganchar la carga requerida. En gravedad cero, el brazo es capaz de levantar 586.000 libras de peso y colocarlo con una precisión asombrosa. La masa total del brazo sobre la superficie de la Tierra es de 994 libras.
RMS se ha utilizado para lanzar y buscar satélites y también ha demostrado ser una ayuda invaluable para los astronautas durante el proceso de reparación. telescopio espacial Hubble. La última misión de Canadarm como parte de la nave espacial lanzada en julio de 2011 y fue la nonagésima misión del robot.

Sistemas de servicios móviles
El Sistema de Servicio Móvil (MSS) es un sistema similar al RMS y también se conoce como Canadarm 2. El sistema fue diseñado para instalación internacional. estación espacial como manipulador de objetos. El MSS está diseñado para mantener equipos e instrumentos instalados en la Estación Espacial Internacional, así como para ayudar en el transporte de alimentos y equipos dentro de la estación.

diestro
Como parte de la misión espacial STS-123 en 2008, astronave Endeavor transportó la última parte del brazo flexible propósito especial Dexter.
Dextre es un robot equipado con dos manos grandes. El robot es capaz de realizar tareas de montaje de precisión que antes realizaban los astronautas durante los paseos espaciales. Dextre puede transportar objetos, operar herramientas e instalar o retirar equipos en la estación espacial. Dextre también está equipado con iluminación, equipo de vídeo, una base para herramientas y cuatro portaherramientas. Los sensores permiten que el robot "sienta" los objetos que manipula y responda automáticamente a movimientos o cambios. El equipo puede monitorear el trabajo usando cuatro cámaras instaladas.
El diseño del robot se parece a una persona. parte superior su cuerpo puede girar a la altura de la cintura y sus hombros están sostenidos por brazos ubicados a ambos lados.

robots en la educación
La robótica se ha convertido en una herramienta divertida y accesible para enseñar y apoyar enfoques STEM, diseño y resolución de problemas. En robótica, los estudiantes tienen la oportunidad de realizarse como diseñadores, artistas y técnicos al mismo tiempo, utilizando sus propias manos y cabezas. Esto abre enormes posibilidades para la aplicación de principios científicos y matemáticos.
En el sistema educativo moderno, teniendo en cuenta las restricciones financieras, secundaria y escuelas superiores Buscan constantemente formas rentables de enseñar programas complejos que combinen tecnología con múltiples disciplinas a los estudiantes para prepararlos para sus carreras. Los profesores ven inmediatamente las ventajas de la robótica y de esta formación, ya que implementan un método interdisciplinar que combina varias disciplinas. Además, la robótica ofrece los equipos más asequibles y reutilizables.
Hoy, más que nunca, las escuelas utilizan programas de robótica para dar vida al aula. cursos de formación y garantizar el cumplimiento de una amplia gama de estándares académicos requeridos para los estudiantes. La robótica no sólo proporciona una base amplia y única para la enseñanza de una variedad de disciplinas técnicas, sino también un campo de tecnología que tiene un impacto significativo en el desarrollo de la sociedad moderna.
¿Por qué es importante la robótica?
Como se puede ver en la sección "Posibilidades de aplicación y ejemplos de robots", la robótica es un nuevo campo de la tecnología que se utiliza en muchas áreas de la vida humana. Un factor importante en el desarrollo de la sociedad es la educación de todos sus miembros en términos de tecnologías existentes. Pero no lo es la única razón La creciente importancia de la robótica. La robótica combina de manera única los fundamentos de las disciplinas STEM ( ciencias naturales, tecnología, ingeniería y matemáticas). Durante el aprendizaje en el aula, los estudiantes exploran diferentes disciplinas y sus relaciones utilizando herramientas modernas, tecnológicamente avanzadas y atractivas. Además, la representación visual de los proyectos que se requieren de los estudiantes los alienta a experimentar y ser creativos para encontrar soluciones viables y estéticamente agradables. Al combinar estos aspectos del trabajo, los estudiantes llevan sus conocimientos y capacidades al siguiente nivel.
robótico(Checo. robot de robota- trabajo forzoso y robar- esclavo) - especialista en el desarrollo de robots y su mantenimiento. La profesión es adecuada para quienes estén interesados en la física, las matemáticas, el dibujo y la informática (consulte Elegir una profesión en función del interés en las materias escolares).
Características de la profesión.
Robótica(robótica) es una rama científica aplicada dedicada a la creación de robots y sistemas técnicos automatizados. Estos sistemas también se denominan sistemas robóticos (RTS). Otro nombre es robótica. Así se llama el proceso de creación de robots, por analogía con la ingeniería mecánica. Los robots son especialmente necesarios cuando es demasiado difícil o peligroso para un humano trabajar y donde cada acción debe realizarse con una precisión sobrehumana. Por ejemplo, un robot puede tomar muestras de suelo en Marte, desactivar un artefacto explosivo o ensamblar un dispositivo con precisión.
Por supuesto, cada tipo de trabajo requiere de un robot especial. Todavía no existen robots universales. Toda la robótica se puede dividir en industrial, de construcción, de aviación, espacial, submarina y militar. Además, existen robots asistentes, robots para juegos, etc.
El robot puede funcionar según un programa desarrollado previamente o bajo el control de un operador. No existen robots con pensamiento y motivación independientes, con su propio mundo emocional y visión del mundo. Es para mejor.
La robótica está relacionada con la mecatrónica.
Mecatrónica es una disciplina dedicada a la creación y operación de máquinas y sistemas controlados por computadora. La mecatrónica suele denominarse electromecánica y viceversa.
La mecatrónica incluye máquinas de fábrica con control de programa, no tripuladas. vehículos, equipos de oficina modernos, etc. Es decir, dispositivos y sistemas diseñados para realizar una tarea específica. Por ejemplo, la tarea de una impresora de oficina es imprimir documentos.
¿Qué es esencialmente un robot?
Como sugiere el propio nombre, el robot fue concebido inicialmente como algo parecido a un ser humano. Pero el pragmatismo prevalece. Y la mayoría de las veces, al robot se le asigna el papel de un dispositivo técnico, para el cual la apariencia no es de gran importancia. Como mínimo, los robots industriales no se parecen en nada a las personas.
Sin embargo, los robots tienen una característica que los une a todos los seres vivos: el movimiento. Y el método de movimiento a veces copia con bastante claridad lo que se encuentra en la naturaleza. Por ejemplo, un robot puede volar como una libélula, correr por una pared como un lagarto, caminar por el suelo como un humano, etc.
(Ver vídeo al final de la página).
Por otro lado, algunos robots están diseñados específicamente para la respuesta emocional de las personas. Por ejemplo, los perros robot alegran la vida de las personas que no tienen tiempo para un perro de verdad. Y los “bebés” de peluche alivian la depresión.
No está lejano el momento en que, entre otros electrodomésticos, tengamos robots que ayuden en las tareas del hogar. Personalmente, preferiría un sirviente en forma de capullo de plástico sonriente sobre ruedas. Pero probablemente alguien querrá que sus robots mayordomos parezcan personas reales. Ya se han logrado avances sorprendentes en esta dirección.
Construir un robot es lo que hace robotista. Más precisamente, ingeniero en robótica. Parte de las tareas que resolverá el robot, piensa en los componentes mecánicos y electrónicos y programa sus acciones. Este tipo de trabajo no es para un inventor solitario; los ingenieros en robótica trabajan en equipo.
Pero un robot no sólo debe inventarse y desarrollarse. Necesita mantenimiento: gestionar la obra, controlar su “bienestar” y repararla. Esto también lo hace un roboticista, pero se especializa en mantenimiento.
en el nucleo robótica moderna son mecánica, electrónica y programación. Pero, como sugieren los escritores de ciencia ficción, con el tiempo las biotecnologías y las nanotecnologías se utilizarán ampliamente para fabricar robots. El resultado será un cyborg, es decir. un organismo cibernético es algo entre una persona viva y un robot. Para no estar demasiado contento con esto, puedes ver la película “Terminator”, cualquier parte de ella.
El comienzo de la historia de los robots.
La palabra "robot" fue acuñada por Karel Capek en 1920 y utilizada en su obra "R.U.R." (Robots universales de Rossum). Más tarde, en 1941, Isaac Asimov utilizó la palabra "robótica" en la historia de ciencia ficción "Liar".
Pero aparentemente el inventor árabe Al-Jazari, que vivió en el siglo XII, puede ser considerado uno de los primeros robóticos de la historia de la humanidad. Quedan pruebas de que creó músicos mecánicos que entretenían al público tocando el arpa, la flauta y las panderetas. Leonardo da Vinci, que vivió en Siglos XV-XVI, dejó dibujos de un caballero mecánico capaz de mover brazos y piernas y abrir la visera de su casco. Pero estos destacados inventores difícilmente podían imaginar qué alturas alcanzaría la tecnología en unos pocos siglos.
entrenamiento en robótica
Para convertirse en robótico, es necesario obtener una educación superior en mecatrónica y robótica. En particular, esta área incluye la especialidad “robots y sistemas robóticos”. La educación superior otorga el título de "ingeniero".
Con este curso podrás conseguir la profesión de especialista en mecatrónica y robótica en 3 meses y 10.000 rublos.
— Uno de los precios más asequibles en Rusia;
— Diploma de reciclaje profesional de la forma establecida;
— Formación en formato totalmente a distancia;
— Certificado de cumplimiento de las normas profesionales por valor de 10.000 rublos. ¡como regalo!;
— El más grande institución educativa profesor adicional educación en Rusia.
Hoy en día, las clases de robótica se están volviendo muy populares. Estas lecciones ayudan a los escolares a formar y desarrollar el pensamiento crítico, aprender a abordar creativamente el proceso de resolución de problemas de distintos niveles de complejidad y también adquirir habilidades de trabajo en equipo.
Nueva generación
La educación moderna avanza hacia una nueva etapa de su desarrollo. Muchos profesores y padres buscan una oportunidad para que los niños se interesen por la ciencia, inculquen el amor por el aprendizaje y les carguen el deseo de crear y pensar de forma innovadora. Las formas tradicionales de presentar material hace tiempo que perdieron su relevancia. La nueva generación no es como sus antepasados. Quieren aprender de una manera animada, interesante e interactiva. Esta generación navega fácilmente tecnologías modernas. Los niños quieren desarrollarse de tal manera que no sólo estén al día con las tecnologías en rápido desarrollo, sino que también participen directamente en este proceso.
A muchos de ellos les interesa: “¿Qué es la robótica? ¿Dónde puedes aprender esto?
Educación y robots
Esta disciplina académica incluye materias como diseño, programación, algoritmos, matemáticas, física y otras disciplinas relacionadas con la ingeniería. La Olimpiada Mundial de Robótica (Olimpiada Mundial de Robótica - WRO) se celebra anualmente. En el ámbito educativo, se trata de una competición masiva que permite a quienes se enfrentan por primera vez a un tema de este tipo aprender mejor qué es la robótica. Brinda a participantes de más de 50 países la oportunidad de probarlo. A la competición asisten unos 20 mil equipos formados por niños de 7 a 18 años.
El principal objetivo de WRO: desarrollo y popularización de la CTT (creatividad científica y técnica) y la robótica entre jóvenes y niños. Estas Olimpíadas son una herramienta educativa moderna del siglo XXI.
Nuevas características
Para que los niños comprendan mejor qué es la robótica, se necesitan habilidades teóricas y prácticas adquiridas en las clases en el marco de trabajo del club Y plan de estudios escolar para el estudio de materias de ciencias naturales y ciencias exactas. La pasión por la disciplina robótica se convierte gradualmente en un deseo de aprender más profundamente sobre ciencias como las matemáticas, la física, la informática y la tecnología.
WRO es una oportunidad única para que sus participantes y observadores no sólo aprendan más profundamente sobre la robótica, sino también para desarrollar la creatividad y las habilidades de pensamiento crítico que son tan necesarias en el siglo XXI.

Educación
El interés por la disciplina educativa de la robótica crece día a día. La base material mejora y se desarrolla constantemente, muchas ideas que hasta hace poco eran un sueño ahora son una realidad. El estudio de la asignatura "Fundamentos de la robótica" se ha hecho posible para un gran número de niños. En las lecciones, los niños aprenden a resolver problemas con recursos limitados, procesar y asimilar información y utilizarla de la manera correcta.
Los niños aprenden fácilmente. La generación joven moderna, educada con diversos aparatos, por lo general no tiene dificultades para dominar la disciplina "Fundamentos de la robótica", siempre que tenga el deseo y la sed de nuevos conocimientos.
Es necesario que incluso a los adultos les resulte más difícil volver a entrenar que enseñar las mentes puras pero sedientas de los niños. Una tendencia positiva es la enorme atención prestada a la popularización de la robótica en ambiente juvenil por agencias gubernamentales rusas. Y esto es comprensible, ya que la tarea de modernizar y atraer a jóvenes especialistas es una cuestión de competitividad del Estado en el ámbito internacional.
Importancia del tema
Hoy tema de actualidad Ministerio de Educación que vale la pena presentar robótica educativa en el conjunto de disciplinas escolares. Se considera una importante zona de desarrollo. En las lecciones de tecnología, los niños deben adquirir una comprensión de esfera moderna desarrollo de tecnología y diseño, que les dan la oportunidad de inventar y construir ellos mismos. No es necesario que todos los estudiantes se conviertan en ingenieros, pero todos deberían tener la oportunidad.

En general, las lecciones de robótica son sumamente interesantes para los niños. Es importante que todos lo entiendan, tanto los profesores como los padres. Estas clases brindan la oportunidad de ver otras disciplinas desde una perspectiva diferente y comprender el significado de su estudio. Pero es el significado, la comprensión de por qué esto es necesario, lo que mueve la mente de los chicos. Su ausencia niega todos los esfuerzos de profesores y padres.
Un factor importante es que aprender robótica no es un proceso estresante y absorbe completamente a los niños. Esto no es sólo el desarrollo de la personalidad del estudiante, sino también una oportunidad para alejarse de la calle, del entorno desfavorable, del pasatiempo ocioso y de las consecuencias que ello conlleva.
Origen
El nombre de robótica en sí proviene del correspondiente inglés robótica. Se trata de una ciencia aplicada que se ocupa del desarrollo de sistemas técnicos automatizados. En producción, es uno de los principales fundamentos técnicos de la intensificación.
Todas las leyes de la robótica, como la ciencia misma, están estrechamente relacionadas con la electrónica, la mecánica, la telemecánica, la mecanotrónica, la informática, la ingeniería de radio y la ingeniería eléctrica. La robótica en sí se divide en industrial, de construcción, médica, espacial, militar, submarina, de aviación y doméstica.
El concepto de “robótica” fue utilizado por primera vez en sus historias por un escritor de ciencia ficción en 1941 (la historia “Mentiroso”).
La palabra "robot" fue acuñada en 1920 por escritores checos y su hermano Josef. Fue incluido en la obra de ciencia ficción "Rossum's Universal Robots", que se representó en 1921 y disfrutó de un gran éxito de audiencia. Hoy se puede observar cómo la línea trazada en la obra se ha desarrollado ampliamente a la luz de la cinematografía de ciencia ficción. La esencia de la trama: el propietario de la planta está desarrollando y poniendo en marcha la producción de una gran cantidad de androides que pueden trabajar sin descanso. Pero estos robots acaban rebelándose contra sus creadores.

Ejemplos historicos
Curiosamente, los inicios de la robótica aparecieron en la antigüedad. Prueba de ello son los restos de estatuas en movimiento que fueron realizadas en el siglo I a.C. Homero escribió en la Ilíada sobre sirvientas creadas de oro que podían hablar y pensar. Hoy en día, la inteligencia con la que están dotados los robots se llama: inteligencia artificial. Además, al antiguo ingeniero mecánico griego Arquitas de Tarento se le atribuye el diseño y la creación de la paloma voladora mecánica. Este evento se remonta aproximadamente al año 400 a.C.
Hay muchos ejemplos de este tipo. Están bien tratados en el libro de I.M. Makarov. y Topcheeva Yu.I. "Robótica: historia y perspectivas". Habla de forma popular sobre los orígenes de los robots modernos y también describe la robótica del futuro y el correspondiente desarrollo de la civilización humana.
tipos de robots
En la etapa actual, las clases más importantes de robots de uso general son los móviles y manipulativos.
El móvil es maquina automatica con chasis móvil y accionamientos controlados. Estos robots pueden caminar, desplazarse, rastrearse, gatear, nadar o volar.
Un manipulador es una máquina automática estacionaria o móvil, que consta de un manipulador con varios grados de movilidad y control de programa que realiza funciones motoras y de control en la producción. Estos robots vienen en forma de suelo, de portal o suspendidos. Están más extendidos en las industrias de fabricación de instrumentos y maquinaria.

Formas de moverse
Los robots con ruedas y orugas se han generalizado. Mover un robot andante es un problema dinámico desafiante. Estos robots aún no pueden tener el movimiento estable inherente a los humanos.
Respecto a los robots voladores, podemos decir que la mayoría de los aviones modernos son solo eso, pero están controlados por pilotos. Al mismo tiempo, el piloto automático puede controlar el vuelo en todas las etapas. Los robots voladores también incluyen su subclase: misiles de crucero. Estos dispositivos son livianos y realizan misiones peligrosas, incluido disparar a las órdenes del operador. Además, existen dispositivos de diseño capaces de disparar de forma independiente.
Hay robots voladores que utilizan las técnicas de propulsión que utilizan los pingüinos, las medusas y las mantarrayas. Este método de movimiento se puede ver en los robots Air Penguin, Air Ray y Air Jelly. Son fabricados por Festo. Pero los robots RoboBee utilizan métodos de vuelo de insectos.
Entre los robots rastreros, hay una serie de desarrollos que se parecen en movimiento a gusanos, serpientes y babosas. En este caso, el robot utiliza fuerzas de fricción sobre una superficie rugosa o la curvatura de la superficie. Este tipo de movimiento es útil para espacios estrechos. Estos robots son necesarios para buscar personas bajo los escombros de los edificios destruidos. Los robots con forma de serpiente son capaces de moverse en el agua (como el ACM-R5 fabricado en Japón).
Los robots que se mueven a lo largo de una superficie vertical utilizan los siguientes enfoques:
- similar a una persona que trepa por una pared con repisas (robot Capuchino de Stanford);
- similar a los geckos equipados con ventosas (Wallbot y Stickybot).
Entre los robots nadadores, hay muchos desarrollos que se mueven según el principio de imitar a los peces. La eficiencia de dicho movimiento es un 80% mayor que la eficiencia del movimiento con hélice. Estos diseños se caracterizan por un bajo nivel de ruido y una alta maniobrabilidad. Por eso son de gran interés para los investigadores submarinos. Estos robots incluyen modelos de la Universidad de Essex: Robotic Fish and Tuna, desarrollados por el Field Robotics Institute. Siguen el modelo del movimiento característico del atún. Entre los robots que imitan el movimiento de una raya se conoce el desarrollo de la empresa Festo: Aqua Ray. Y el robot que se mueve como una medusa es Aqua Jelly del mismo desarrollador.
trabajo de club
La mayoría de los clubes de robótica están dirigidos a principiantes y escuela secundaria. Pero los niños en edad preescolar no se ven privados de atención. El papel principal aquí lo juega el desarrollo de la creatividad. Los niños en edad preescolar deben aprender a pensar libremente y traducir sus ideas en creatividad. Por eso las clases de robótica en clubes para niños menores de 6 años están dirigidas a uso activo cubos y juegos de construcción sencillos.
Sin duda, el plan de estudios escolar se está volviendo más complicado. Le brinda la oportunidad de familiarizarse con diferentes clases de robots, probarse en la práctica y profundizar en la ciencia. Las nuevas disciplinas revelan el potencial del niño para adquirir habilidades y conocimientos profesionales en el campo de la ingeniería elegido.

Complejos robóticos
El desarrollo moderno de la robótica se encuentra en tal etapa que parece que está a punto de ocurrir un gran avance en la tecnología robótica. Esto es lo mismo que ocurre con las videollamadas y los dispositivos móviles. Hasta hace poco, todo esto parecía inaccesible al consumo masivo. Pero hoy es algo común y ha dejado de sorprender. Pero cada exposición de robótica nos muestra proyectos fantásticos que capturan el espíritu de una persona con solo pensar en su implementación en la vida de la sociedad.
En el sistema educativo, las complejas instalaciones de robots permiten implementar un programa utilizando actividades del proyecto, entre las que destacan las siguientes:

Control
Por tipo de sistemas de control existen:
- biotécnico (comando, copia, semiautomático);
- automático (software, adaptativo, inteligente);
- interactivo (automatizado, de supervisión, interactivo).
Las principales tareas del control de robots incluyen:
- planificar movimientos y posiciones;
- planificación de fuerzas y momentos;
- identificación de datos dinámicos y cinemáticos;
- análisis de precisión dinámica.
El desarrollo de métodos de control es de gran importancia en el campo de la robótica. Esto es importante para la cibernética técnica y la teoría del control automático.